
【▲ 月面に着陸したispaceのランダーの想像図(Credit: ispace)】
株式会社ispaceは4月12日、同社の月面探査プログラム「HAKUTO-R」ミッション1について、早ければ2週間後にもランダー(月着陸船)による民間企業初の月面着陸を実施する予定であると発表しました。発表時点での着陸予定日時は日本時間2023年4月26日1時40分です(※運用状況により変更される可能性があります)。
関連:【特集】月面探査プログラム「HAKUTO-R」ミッション1
同社によると、HAKUTO-Rミッション1のランダーは4月12日の時点で月を周回する高度100×2300kmの楕円軌道を飛行しています。発表ではランダーに搭載されているカメラを使って3月26日に高度2000km付近で撮影された月面の画像もあわせて公開されました。

【▲ HAKUTO-Rミッション1ランダーに搭載されているispaceのカメラで2023年3月26日に撮影された月の東縁付近(Credit: ispace)】
ミッション1ランダーは複数回のマヌーバ(姿勢や軌道の制御)を行って高度100kmの円軌道に到達した後、4月26日0時40分頃に降下を開始して着陸体制に入ります。軌道速度からの減速と姿勢制御を自律的に行いつつ、ランダーは約1時間後に月面へ軟着陸する予定です。
HAKUTO-Rミッション1では打ち上げから月面着陸までの各段階に応じて10のマイルストーンが設定されていて、3月21日にはSuccess 7「月重力圏への到達/月周回軌道への到達」の完了が発表されていました。次のマイルストーンはSuccess 8「月周回軌道上での全ての軌道制御マヌーバの完了」で、これは高度100kmの円軌道に到達した段階で完了します。
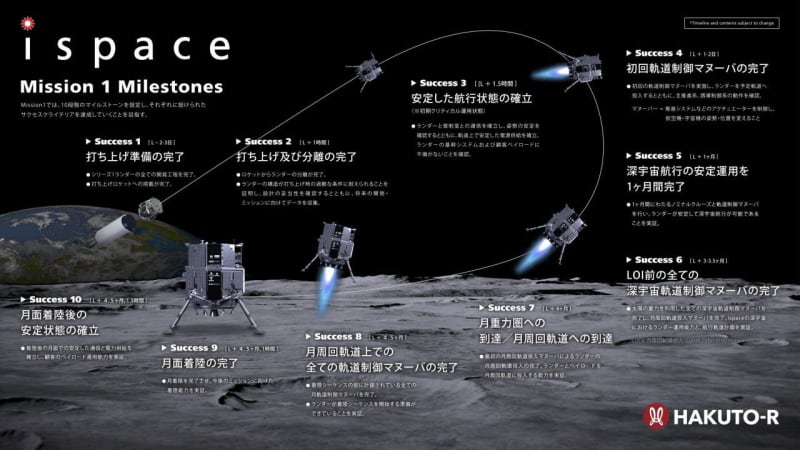
【▲ ispace「HAKUTO-R」ミッション1のマイルストーンを示した図(Credit: ispace)】
なお、HAKUTO-Rミッション1ランダーに搭載されているペイロードは以下の通りです。
・日本特殊陶業株式会社(HAKUTO-Rコーポレートパートナー)の固体電池
・アラブ首長国連邦(UAE)ムハンマド・ビン・ラシード宇宙センター(MBRSC)の月面探査車「Rashid(ラシード)」
・株式会社タカラトミー等が開発した変形型の月面探査ロボット「SORA-Q(LEV-2)」
・カナダのMCSS社が開発した人工知能(AI)を用いたフライトコンピューター
・カナダのCanadensys社のカメラ
・HAKUTOのクラウドファンディング支援者の名前を刻印したパネル
・サカナクションの「SORATO」(HAKUTO※応援歌)の楽曲音源を収録したミュージックディスク
※…HAKUTOは民間初の月面無人探査を競うコンテスト「Google Lunar XPRIZE」に日本から参加したチームで、HAKUTO-Rの前身にあたる。Google Lunar XPRIZEは勝者がないまま2018年に終了。

【▲ UAEの月面探査車「Rashid」の想像図(Credit: MBRSC)】

【▲ 変形型月面ロボット「SORA-Q(LEV-2)」。左は変形前、右は変形後の様子(Credit: タカラトミー)】
Source
- Image Credit: ispace, MBRSC, タカラトミー
- ispace \- ispace、ミッション1の月面着陸予定日を最短で4月26日(日本時間)に設定
文/sorae編集部

