株式会社ispaceは4月26日、同社の月面探査プログラム「HAKUTO-R」ミッション1について、着陸後に通信が途絶えたランダー(月着陸船)との通信回復は見込まれず、月面着陸を確認することは困難だと判断したことを明らかにしました。民間初の月面着陸を目指したHAKUTO-Rミッション1は着陸成功には至らず、ランダーは月面にハードランディング(叩きつけられるような着陸、硬着陸)したものとみられています。【2023年4月26日12時】

【▲ 月面へと降下するランダーの想像図。ispaceが公開している動画より(Credit: ispace)】
HAKUTO-Rミッション1のランダーは2022年12月11日(日本時間・以下同様)に米国フロリダ州のケープカナベラル宇宙軍基地からスペースXの「ファルコン9」ロケットで打ち上げられ、2023年3月21日に月を周回する軌道へ到達することに成功していました。同ミッションは「ランダーの設計及び技術の検証」と「月面輸送サービスと月面データサービスの提供という事業モデルの検証及び強化」を目的としており、ランダーは「氷の海」の南東に位置するアトラス・クレーターに着陸する予定でした。
関連:【特集】月面探査プログラム「HAKUTO-R」ミッション1
ミッション1のランダーは2023年4月26日0時40分に高度約100kmの月周回軌道を離脱して着陸シーケンスに従い降下を開始し、1時間後の同日1時40分に着陸する予定でしたが、着陸予定時刻頃にミッションコントロールセンター(管制室)との通信が途切れました。ispaceによれば月面着陸直前に通信が一時途切れる可能性があり、着陸の成否を確認するまでに少し時間がかかる可能性があるということでしたが、その後もランダーとの通信は確立できない状態が続いていました。

【▲ HAKUTO-Rミッション1の着陸シーケンスを示した図(Credit: ispace)】
周回軌道では月面に対して水平方向に飛行していたランダーは、主推進系のエンジンを噴射して軌道を離脱した後は姿勢を制御して徐々に機体を起こし、最終的に垂直の姿勢で月面へ降下してソフトランディング(速度を抑えたゆっくりとした着陸、軟着陸)する予定でした。
ispaceによると、着陸シーケンスの終盤にランダーの姿勢が月面に対して垂直状態になったことは確認されたものの、1時40分の着陸予定時刻を過ぎても着陸を示すデータは確認できず、機体はじわじわと降下し続けました。その間も主推進系は噴射を継続しており、やがて推進剤の残量(推定値)がなくなったこと、機体の降下速度が急速に上昇したことがデータから確認されており、最終的にテレメトリ(データを遠隔で取得する手法のこと)の取得ができない状態になったといいます。
以上の状況から、HAKUTO-Rミッション1のランダーは最終的に月面へ自由落下してハードランディングに至った可能性が高いと推定されています。
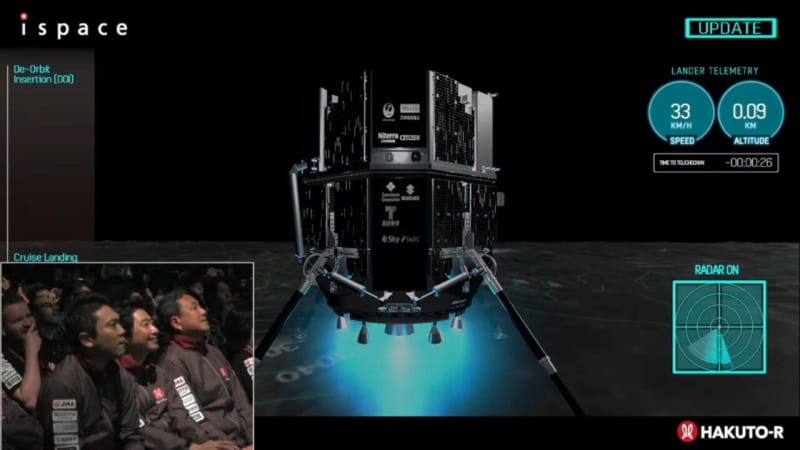
【▲ HAKUTO-Rミッション1ランダーの降下状況を示したシミュレーションCGと、着陸の様子を見守るispaceの袴田武史代表取締役ら。ispaceのライブ配信から(Credit: ispace)】
4月26日に発表されたispaceのプレスリリースの第2報では「これまでに取得されたテレメトリの詳細な解析を実施している状況」と述べられていますが、同日午前中に開催された記者会見では、同社の氏家亮CTOがデータ上の高度と実際の高度が食い違っていた可能性に言及していました。
高度に誤差が生じることはあらかじめ予想されており、データ上の高度がゼロになっても月面に接地するまでは主推進系を噴射して降下し続けることになっていたものの、機体の実際の高度が高すぎたために、降下を続ける途中で主推進系の推進剤が尽きてしまった可能性があるようです。
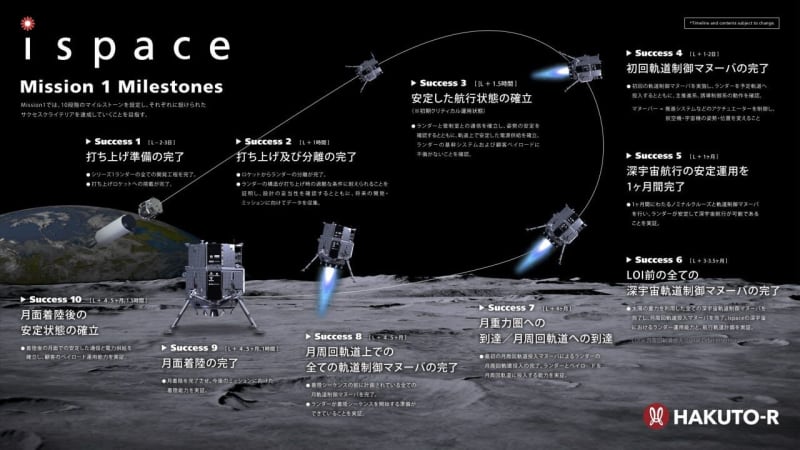
【▲ ispace「HAKUTO-R」ミッション1のマイルストーンを示した図(Credit: ispace)】
HAKUTO-Rミッション1では打ち上げから月面着陸までの各段階に応じて10のマイルストーンが設定されていて、高度約100kmの月周回軌道に到達した4月14日の段階ではSuccess 8「月周回軌道上での全ての軌道制御マヌーバの完了」が達成されていました。次のマイルストーンはSuccess 9「月面着陸の完了」でしたが、ランダーは月面にハードランディングしたとみられることから、達成できないと判断されています。
ispaceはすでにHAKUTO-Rのミッション2(2024年実施予定)とミッション3(2025年実施予定)の準備を進めています。ミッション2では顧客のペイロードに加えて同社のローバー(探査車)も月面に運ばれる予定で、ミッション3では月の裏側にある着陸地点との通信を行うために2機の中継衛星を月周回軌道に投入することも計画されています。
HAKUTO-Rミッション1は結果的に月面着陸には失敗したものの、ランダーは打ち上げから深宇宙航行を経て月周回軌道に入ることに成功し、月面まであと一歩というところまで降下することもできました。ispaceは今回のミッション1で得られた貴重なデータやノウハウを今後のミッションに最大限活用していくとしています。

【▲ HAKUTO-Rミッション2で使用されるランダーの熱構造モデル(Credit: ispace)】
なお、これまでに有人・無人含めて月面着陸に成功したことがあるのは、米国、旧ソ連、中国の3か国です。近年では中国が精力的に月探査を行っており、2019年1月には「嫦娥4号」が史上初めて月の裏側への着陸に成功した他に、2020年12月には「嫦娥5号」が月面で採取したサンプルを地球へ持ち帰ることに成功しました。
2019年4月にはイスラエルの民間企業が開発した月着陸船「ベレシート」が、2019年9月にはインドの月探査ミッション「チャンドラヤーン2号」の着陸船「ヴィクラム」が月面着陸に挑んだものの、どちらも成功には至っていません。2022年11月には日本の無人探査機「OMOTENASHI(オモテナシ)」がアメリカ航空宇宙局(NASA)の「アルテミス1」ミッションに相乗りして打ち上げられましたが、ロケットから放出された後の姿勢制御が計画通り行われず、月面着陸の実施を断念していました。
今後は2023年8月以降に日本の小型月着陸実証機「SLIM(スリム)」がX線分光撮像衛星「XRISM(クリズム)」とともにH-IIAロケット47号機で打ち上げられる予定です。また、2023年中には米国の民間企業インテュイティブ・マシーンズが開発した月着陸船「NOVA-C」と、同じく米国の民間企業アストロボティックが開発した月着陸船「ペレグリン」が打ち上げられる予定です。
Source
- Image Credit: ispace
- ispace \- 民間月面探査プログラム「HAKUTO-R」ミッション1月面着陸について(第二報)
文/sorae編集部

