本規格により、ドローンに関わるステークホルダーにおけるグローバルな衝突回避技術の開発や運用実証、事業化検討が促進され、社会実装の加速化が期待されるとしている。
背景
一般にドローンと呼ばれる小型の無人航空機や、より大きなセンサーなどを搭載できる中型の無人航空機は、既に農業分野などで利用が広がっており、さらには災害時の物資運搬や遭難者捜索、物流インフラなどへの用途拡大が大いに期待されている。
一方で、無人航空機とドクターヘリなど有人航空機とのニアミス実例が国内で報告されるなど、他の航空機との衝突をいかに回避するかが無人航空機の安全利用における喫緊の課題である。また、無人航空機の社会実装に必要不可欠な「目視外飛行」及び「第三者上空飛行」を実現する上でも、衝突回避は重要な技術だ。
無人航空機の衝突回避に関する技術開発は、これまでも各国で行われてきたが、衝突回避の手順や手段は国際的に統一されていなかった。そのため、特定のメーカーの機体同士や限定されたサービスの中でしか回避できず、空の安全が十分に確保できないおそれがあったという。
こうした中で、経済産業省では、国内外での幅広いドローンの利活用の実現に向け、無人航空機の衝突回避に関する国際規格化提案の支援に取り組んできた。
規格改定の概要
2019年11月に初版が発行された「ISO21384-3」は、無人航空機の運航手順を国際規格化したものだが、初版では他の航空機や無人航空機との衝突を回避する手順については規定されていなかった。
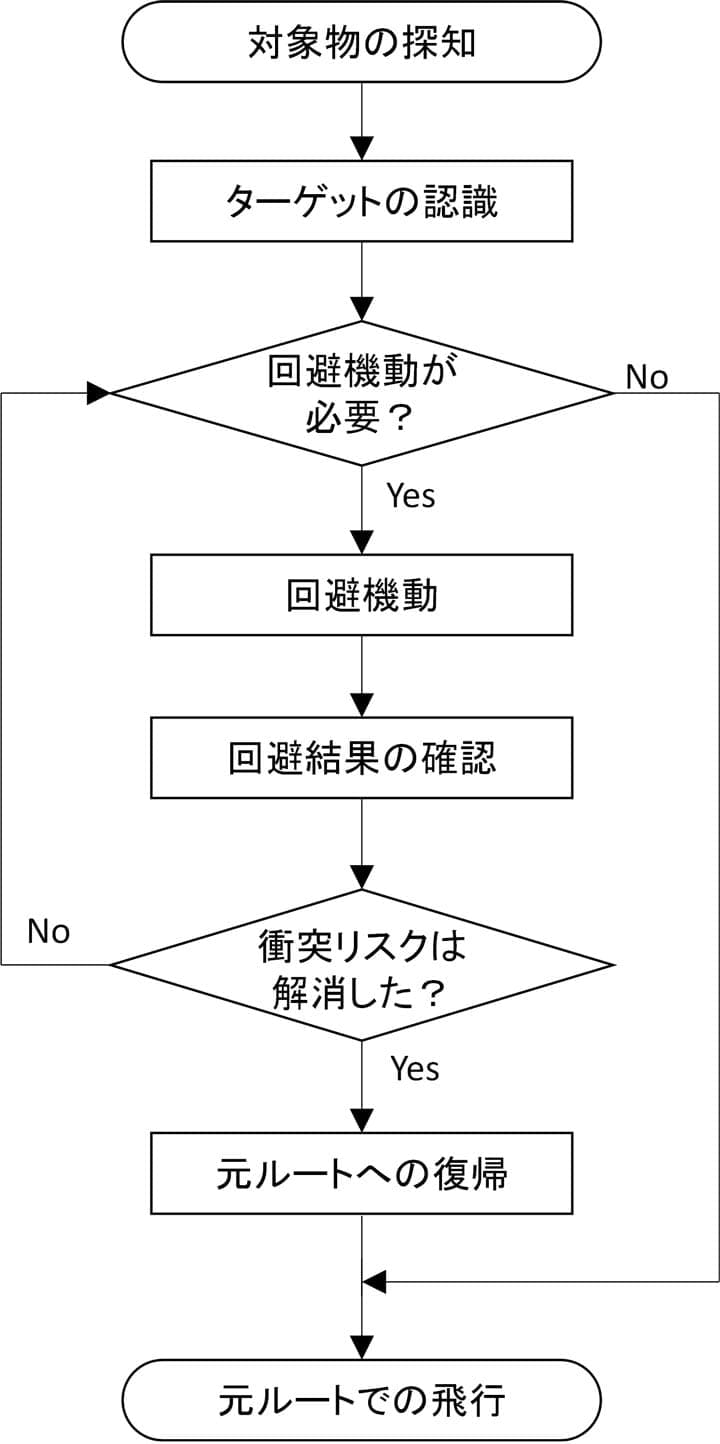
2023年10月2日の改定で、衝突回避のCONOPS(Concept of Operations:運用構想)を新たな章として追加し、「対象物の探知」、「ターゲットの認識」、「回避機動」、「回避結果の確認」、「元ルートへの復帰」及び「元ルートでの飛行」の6ステップからなる基本的な手順を規定した(図2)。今後、無人航空機はこの6ステップに従い、統一された回避機動をとることになるという。
本規格の改定は、NEDOが2017年より進めてきた「ロボット・ドローンが活躍する省エネルギー社会の実現プロジェクト」の成果を基に、2021年より株式会社SUBARU、日本無線株式会社、株式会社ACSLが進めてきたものであり、日本が国際標準化機構(ISO)における検討を主導した。
各社の役割
- SUBARU:衝突回避システムの飛行実証およびCONOPS(運用構想)に関する規格案作成
- 日本無線:衝突回避システムの評価試験と飛行実証
- ACSL:衝突回避システムの機体実装と飛行実証
期待される効果
世界各国のドローンに関わるステークホルダーが、個別に進めてきた無人航空機の衝突回避技術の開発や運用実証、事業化検討などを本規格に基づいて行うことで、グローバルな情報共有や技術開発、社会実装に向けた取組の加速化が期待される。
さらに、衝突回避に関する運航手順が標準化されることで、他の航空機を探知し回避するシステムや、その試験方法などの標準化も促進され、さらなる空の安全が確保されるという。
