ASV(小型無人ボート)やいわゆる海のドローンとして活用が期待されるAUV(自律型無人潜水機)、ROV(遠隔操作型無人潜水機)等の「海の次世代モビリティ」は、省人化や海の可視化等を可能とする技術だ。一方、日本の沿岸・離島地域は、高齢化・過疎化による担い手不足、インフラ老朽化、海域の自然環境劣化等、多くの課題を抱えている。
国土交通省は、このような課題の解決を図るため、「海の次世代モビリティ」の製造・運用者と地方自治体や海域利用者等のユーザーが共同で実施する実証実験を広く公募し、有識者の審査を経て、以下の5件を選定した。
マルチビームソナー搭載ASVによる広域藻場調査の実用化検証
背景・目的
[解決を図る沿岸・離島地域の社会的課題]
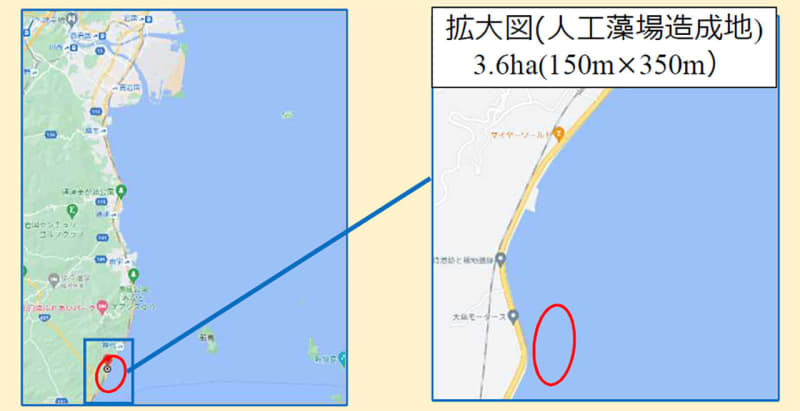
沿岸部の藻場は、水産業の維持・発展と沿岸生態系の維持、ブルーカーボンの固定において重要な役割を果たしている。この藻場の現状や藻場造成等の効果の経時変化の把握において、広域でのモニタリングを簡易に、安全かつ効率的に行うことが課題である。
[立証しようとする次世代モビリティの新たな利活用法]
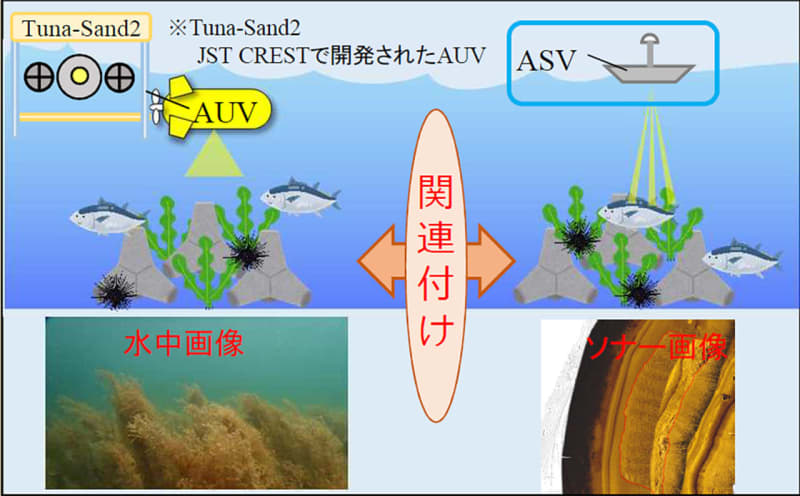
自己位置が取得できるマルチビームソナーを搭載した自律型無人水上機(ASV)により得られたソナーデータと自己位置推定が可能な自律型無人潜水機(AUV)による水中画像とを関連付けることにより、広域での海藻草類分布を把握し、自律型水上無人機(ASV)によるソナーを用いた広域藻場の定量調査手法を検証する。
実験内容
[実験方法]
- マルチビームソナー搭載ASVで得られてたソナーデータと自己位置推定が可能なAUVで得られた水中画像の関連付けを行い、以下の項目について検証する。
- 上記調査・検証を通じてマルチビームソナーを搭載したASVによる広域藻場の定量調査に向けた課題抽出を行い、事業化に向けた対策を検討する。

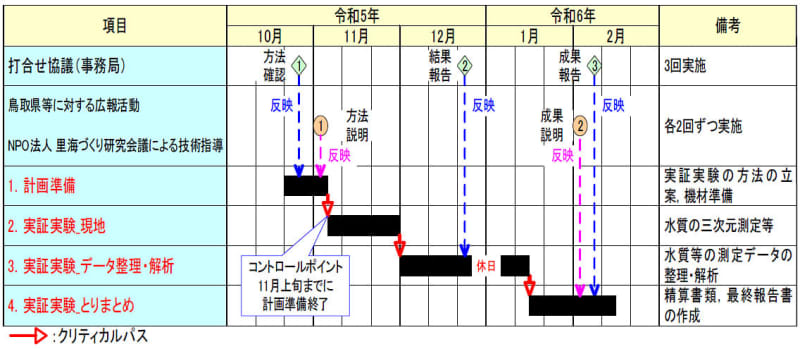
[スケジュール]
多項目水質計搭載のAUVによる水質の三次元測定技術の有効性検証
背景・目的
[解決を図る沿岸・離島地域の社会的課題]
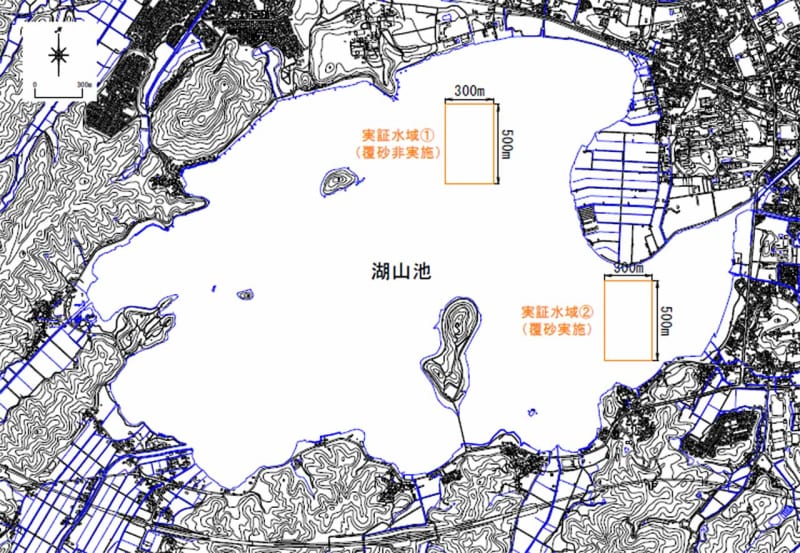
湖山池では、汽水化に伴って湖底深部の貧酸素化といった新たな問題が発生している。これによりヤマトシジミ等の漁獲対象種が斃死した場合には,湖山池の内水面漁業は大打撃を受けることになる。このため、水環境の改善や保全を考える上で貧酸素水塊の発生状況の解明は喫緊の課題であるといえる。
[立証しようとする次世代モビリティの新たな利活用法]
本実証実験は,多項目水質計搭載のAUVを水平・鉛直的に航行させてDO等の三次元測定を実施し、取得した位置ズレの小さい大量の測定データ(高精度、高分解能)を使用して、湖底深部における貧酸素水塊の発生状況の把握を試みるものである。
実験内容
[実験方法]
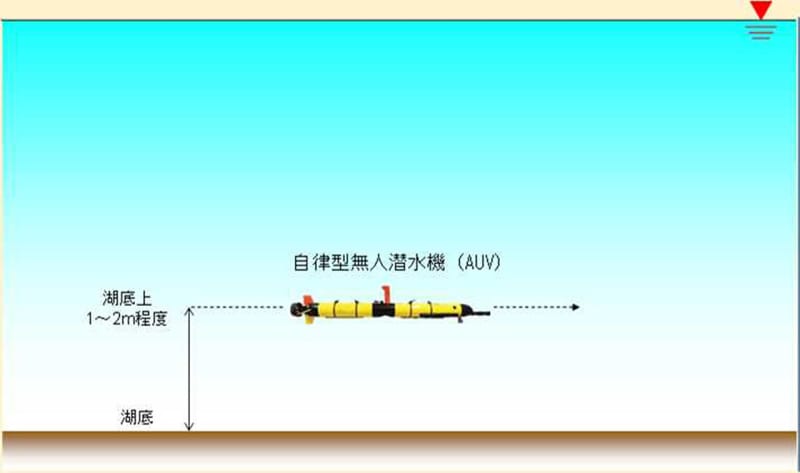
実証水域内(500m×300m)に20m間隔で設定した調査測線16本において,湖底上1~2m程度の深度を速度1m/sでAUVに自律潜航させ(深度の詳細は現地確認後に設定)、搭載した多項目水質計(電気電導度/温度・DO・クロロフィル・濁度センサー)で塩分、水温、DO、クロロフィルおよび濁度を1秒間隔で測定する。
実証水域の三次元空間内を10m×10m×0.5m間隔の3次元格子に分割し、水質の項目(塩分、水温、DO、クロロフィルおよび濁度)別に測定データを線形内挿補間して各格子点の値を推定する。そして、水質の項目別に水深別の水平分布図や調査測線別の鉛直分布図を作成し、湖底深部における貧酸素水塊の発生状況を把握する。

[スケジュール]
ROVによる水中構造物や船底の清掃手法の実証
背景・目的
[解決を図る沿岸・離島地域の社会的課題]
- ダイバーを使わず、また、船等をドックに入れることなくROVを使って船体の清掃をおこなう
- ROVを使って生簀の漁網の状況、内部の魚等の状況を正確に把握する。必要に応じて漁網の清掃をROVがおこなう
[立証しようとする次世代モビリティの新たな利活用法]
- 入渠しないで船体清掃が可能になることにより、ROVの新たなマーケットができあがる
- ドックのような施設がない港などで船体清掃が可能になる
- 養殖漁業の省力化、高度な管理体制が実現する
実験内容
[実験方法]
- 準備
- ROVの展開(船体の場合)
- ROVの展開(生簀の場合)

[スケジュール]

ROVを用いた海洋構造物の腐食防止のための研掃工程の実証実験
背景・目的
[解決を図る沿岸・離島地域の社会的課題]
沿岸・離島地域における港湾施設の鋼矢板岸壁や鋼管杭桟橋等の腐食防止のためのアルミニウム合金陽極の取付における安全性の確保、施工・点検期間の短縮、人材不足の解消。
[立証しようとする次世代モビリティの新たな利活用法]
Al陽極の磁気吸着工法作業の第一段階として、吸着部の研掃(海洋生物・錆等の除去)のROVを用いての陸上からの遠隔操作と研掃用部品の開発に取り組む。
実験内容
[実験方法]
Step1. 工具・刃の比較検証:ケレンに用いる工具・刃の比較実験を行う
Step2.ケレン機構の開発:既存のケレン工具・刃を改良し、ROVに実装するケレン機構の試作・検証を行う
Step3. ケレン機構の実装:ROVにケレン機構を実装し、プールにて能力の検証・改良を行う。
Step4. 実環境での検証:プール内で自動航行とケレンを行えるROVの試作機が完成したら、実環境での能力を検証し、改良を行う。
[スケジュール]

ROVを用いた矢板の高圧洗浄・肉厚測定に関する検証
背景・目的
[解決を図る沿岸・離島地域の社会的課題]
社会インフラの老朽化と水中点検時の潜水士不足は全国共通の課題である。矢板等の港湾鋼構造物の健全性確認は潜水士の作業が必須であり、将来的な人手不足が懸念されている。
[立証しようとする次世代モビリティの新たな利活用法]
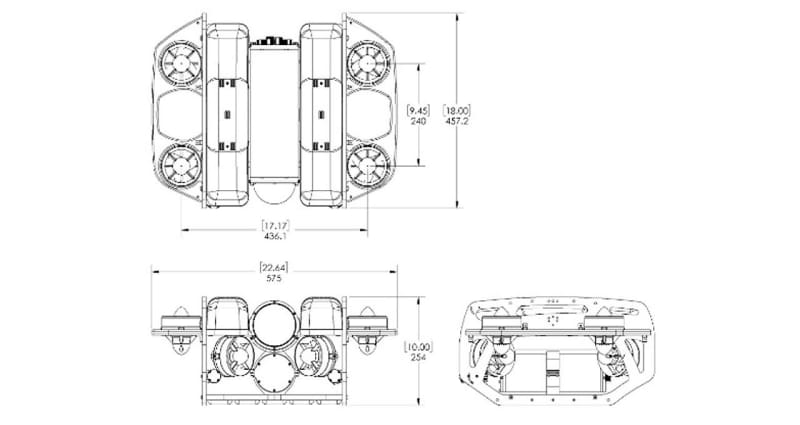
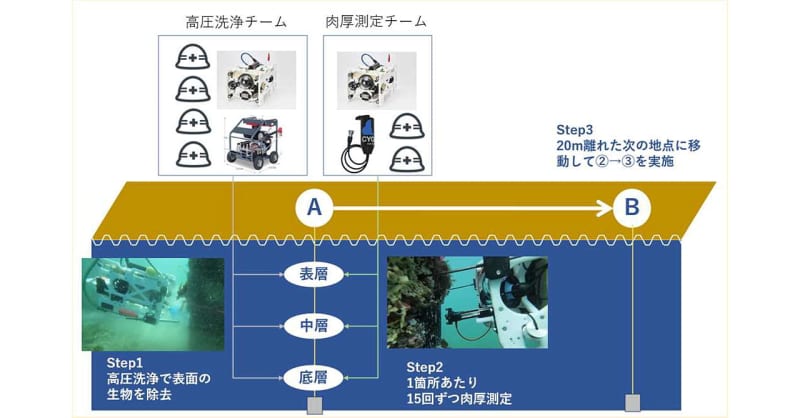
高圧洗浄機と肉厚測定器を搭載したROVを1式ずつ用意し、矢板表面の付着生物除去と肉厚測定を実施。維持管理計画書策定のための現地調査積算基準(国土交通省)等を参考に、測定精度、作業効率、コストの点で潜水士と比較したROVの実用性を検証する。
実験内容
[実験方法]
- 高圧洗浄用、肉厚測定用に合計2式のROVを準備
- 高圧洗浄により表面の付着生物を除去した箇所で肉厚測定する
- 表層・中層・底層が完了したら次の地点に移動する
- 以上の作業を繰り返し行う
- 潜水士により実施する場合の積算基準と比較した作業効率、コストについて検証する。また、潜水士と比較したROVでの測定精度について検証する。
[スケジュール]


