現在、航空法内で規定されているドローンは総重量25kg未満のものであり、25kg以上は個別の許可承認が必ず必要になっている。
エアモビリティの進捗に伴い、国交省も総重量25kg以上の個別の許可承認を必要としない型式認証や機体認証のルールを決めようとしている。最大離陸重量が150kg以上の機体は製造、修理等について航空機と定められているため、ドローンとして扱える機体は最大離陸重量150kg未満となっている。
ドローンの積載量は最大離陸重量25kg未満の機体では5kg程度、最大離陸重量25kg以上の機体では30~50kg程度となる。現在宅配便の重量制限は概ね25~30kg以内で、宅配便相当の荷物をすべてドローンで運ぼうとすると、最大離陸重量25kg以上の機体が必要となる。また、国土交通省では避難所等への物資輸送を目的とした機体として、最大離陸重量150kg未満、積載量50kg、航続50kmを開発すべき性能仕様としている。
こういった背景もあり、現在総重量25kg以上の機体開発が機体メーカーで進められる傾向にある。それに伴い、筆者がコンサルティング業務を行っているドローン・ジャパンにも、機体メーカーから中大型ドローンの開発や調整の相談を受けるケースが増えてきている。
中大型ドローンはなぜ開発が難しいか。
現状のドローン機体メーカーの多くは、日本ではマルチコプターでの開発や製造を行っている企業が大半である。(その比較対象としては、シングルローター(ヘリコプター)や固定翼、VTOL(垂直離着陸機)などとなる。)
そのため、中大型ドローンもマルチコプター(4枚羽だけでなく、6枚羽、8枚羽などとあるが)での開発を検討している機体メーカーが多くなっている。
基本的な機体制御に関しては、25kg未満のドローンも25kg以上のドローンも大きくは異ならない。(自律制御の中心に位置するフライトコントローラーに関しては、今後、安全性やセキュリティなどの要因での違いは生じてくる可能性はあるが基本的な制御は一緒だ。)
機体制御に関して、今後は中大型ドローン特有の機体制御やフェイルセーフなどを追加していく必要はあるかとは思うが、現在の難しさはそれ以前の問題である。
それでは何が難しい要因になっているのか。
現在のマルチコプターが、その他のヘリコプターや固定翼およびエンジンなど比べて、物理法則的に非合理性があり、また、それに伴うデバイスが整っていないからだ。それは以下のような問題である。
- マルチコプターの揚力
- モーター
- バッテリー
一つ一つ見ていこう。
マルチコプターの揚力
まずは揚力の発生原理を簡単に説明しよう(これは飛行機も回転翼も、鳥も原理は一緒)。
空気には形状に沿って流れる性質があり、翼の後縁が下を向いていると空気の流れが下向きに曲げられる。翼は空気を下に押し下げているので、作用・反作用の法則で押し下げた空気の反作用で揚力が発生する。空気の流れが下向きに曲がることで翼上面は圧力が低下し翼下面は圧力が上昇する。このように空気の流れを曲げた反作用は翼上面・下面の圧力差として翼に作用する。
この揚力の発生に関しては、ブレード(プロペラは通常2枚から6枚のブレードで構成)の長さやピッチ、角度、ねじれ等と回転速度によって異なってきており、この変化によって、揚力が変わってきている。
また、プロペラには固定ピッチ・プロペラと可変ピッチ・プロペラがあり、前者はピッチが固定のためエンジンの回転数の増減で推進力を変化させている(マルチコプターなどの場合)が、後者は飛行状態に応じてピッチを変換することにより、プロペラ回転数を任意に設定し、プロペラ推進の効率を高めることができる(ヘリコプターなどの場合)。
小型のドローンの場合、回転数はともあれ、ブレードのピッチ、角度、ねじれや長さなどをあまり考慮しなかったケースも多いが、中大型機ではこの辺の設計もきちんと適正化する必要がある。 (この辺を詳しく学びたい方は航空工学でのプロペラの項目を学ぶとよい。)
このプロペラで起こす力が、静止推力となる。この静止推力というのは、ある質量(g)を持つ物体に、9.8m/s(標準重力)の加速度を発生させる力のことである。単位は「gf」で、質量(g)と重力加速度(f:9.8m/s)の積となる。
つまりプロペラが、本体も含めてどの位の重量(gf)を空中に静止させられる推力を持っているかの指標となっている。プロペラが発生する静止推力は、プロペラの直径の3乗に比例し、回転数の2乗に比例し、ピッチに比例する。これを計算式で表すと以下になる。
静止推力(gf)=(D/10)×(P/10)×(N/1000)×k D(ダイヤ):ブレードの直径(単位インチ)(1inch=25.4mm) P(ピッチ):プロペラ1回転で進むことのできる理論的距離(単位インチ) N(回転数<rpm>):KV (1V無負荷での1分間のモーター回転数)×V(電圧) ※この値は実態値となっているので、モーターの実機採用の場合には通常、0.5を掛けるケースが多いが、中大型ドローンなどの場合は、それ以上の推力を必要とする場合も多いため、考慮が必要 k(プロペラ係数):プロペラ推力のプロペラの回転速度に対する比を表す係数となり、ブレード形状などの要因によって変わる。(通常20-32ぐらい)
ここまでがプロペラを主体とした静止推力の内容であったが、その静止推力を使って、マルチコプターがどういう風な動作原理となっているかを見ていこう。
図はX型のクアッドコプターを横から見た場合に左が前で、右が後ろという図となっている(片側のモーター/プロペラのみを示している)。最初の図(ケース1)はドローンがホバリングしている状態で、全体の揚力(個々のプロペラの揚力x4<クアッドコプターのため>)と機体重力が釣り合っている状態となっている。

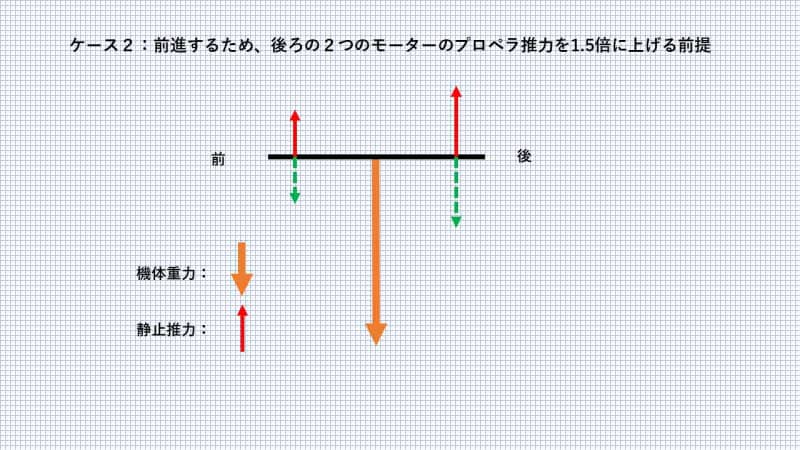
次の図(ケース2)は前進するために前傾させるため、後ろ側のモーターの推力を上げるための準備の図となる(この図では1.5倍に上げようとしている)。
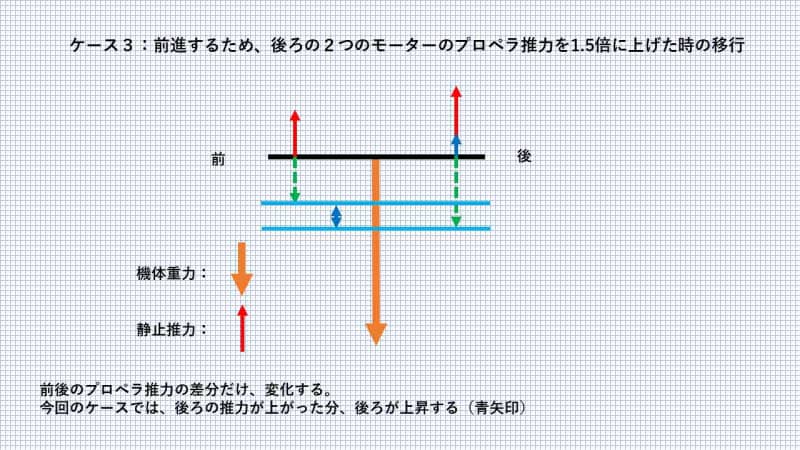
次の図(ケース3)は後ろのモーターを上げた時の移行画面となっており、前後の推力の差分だけ、後ろが上昇する。
次の図(ケース4)は後ろの推力があがり、黒からグレーに機体が前傾した状態だ。

ここまでが前傾までの推移を示している。
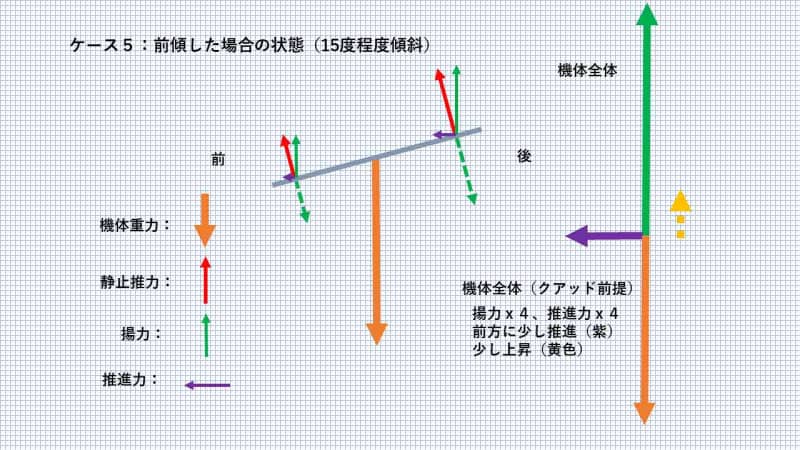
次の図(ケース5)からは、前傾した場合の機体の揚力と推進力を示している。個々のモーターの推力が、垂直方向の揚力と水平方向の推進力に分解される。クアッドのため、その揚力x4と推進力x4が機体全体の揚力と推進力になる。この傾きにより、水平方向の推進が行われる(この場合には、前進<正方向のピッチ>)。
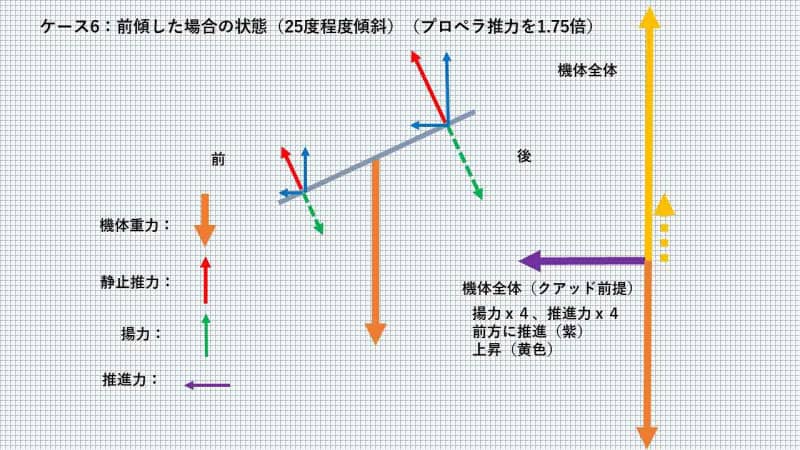
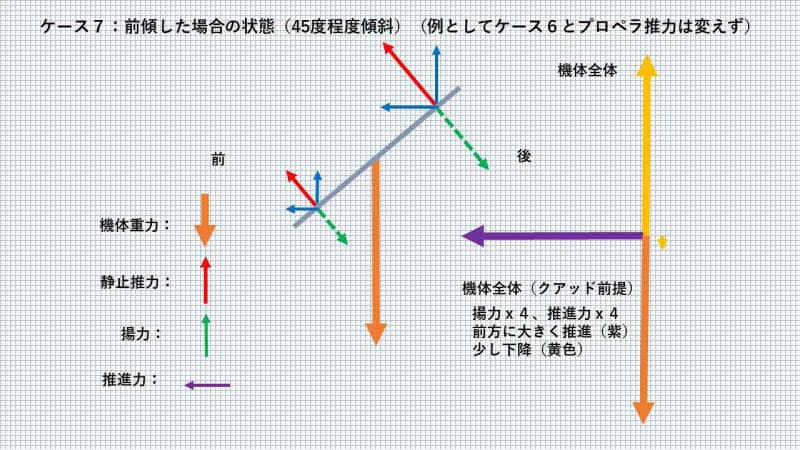
次の図(ケース6)は、後ろの推力を1.5倍から1.75倍に上げている。この場合25°程度の傾斜としている。考え方はケース7と同様。
ケース5に比べ、前傾が強まったことにより、前方への推進力が上がっている。前傾姿勢を強めることにより、前方への推進力(機体のスピードが上がるのはこの原理によっている)。 (実際は揚力が上昇しないように、前方の推力を弱める形で、揚力のバランスを取るように制御されている。)
次の図(ケース7)は、例として、プロペラ推力はまったく変えずに、前傾を深くしている。25°から45°へ(実際、こういったことは生じないが、揚力と推進力を理解しやすいように設定)。より前方への推進力が高まる(機体のスピードが上がる)が、揚力は落ち、少し下降する。
ここまでがマルチコプターの動作原理であるが、ここにマルチコプターの揚力を捉える中での弱みがある。
1つは静止推力においてのポイントだ。静止推力は前に示したように、以下となっている。
プロペラが発生する静止推力は、プロペラの直径の3乗に比例し、回転数の2乗に比例し、ピッチに比例する。
ここで推力に影響が大きいのは、「プロペラの直径の3乗」という部分である。下の図におけるマルチコプターとシングルローターの対比で考えると、ほぼ同じ大きさの機体サイズ相当において、ブレードの長さで見る比較は以下になる。
マルチコプター:24inchの3乗x4(クアッドコプターのため)=13,824x4=55,296 シングルローター:60inchの3乗x1=216,000x1=216,000
55,296と216,000は、ほぼ4倍となっており、シングルローターが有利な状況であり、マルチコプターは推力を生みだす中で物理的に不利となっている。

もう一つは、マルチコプターの動作原理における機体スピードを上げる際の揚力への影響である。機体スピードを上げるには、前傾姿勢をより高めることが必要になる。この際の揚力に関する数式は以下の図となっている。
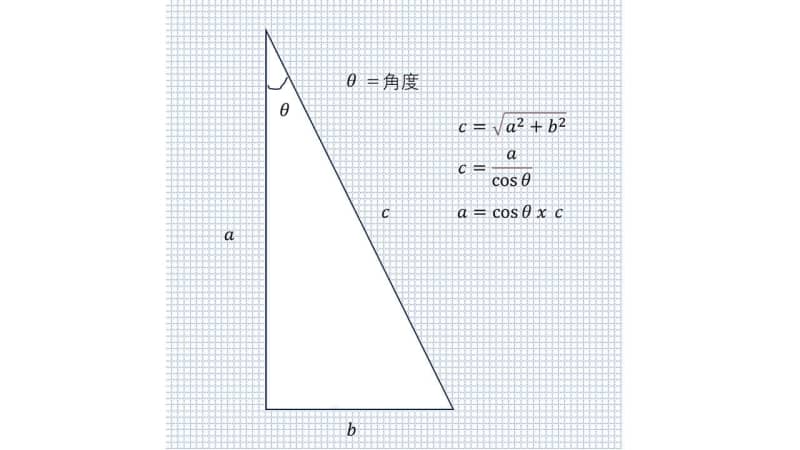
この計算式において、cがプロペラ推力でaが揚力となる(bが推進力)。機体スピードを上げるには、bの推進力を上げる必要があるが、そのためには角度を上げる必要がある。その際に影響を受けるのは揚力となっており、その影響は以下の図のようになる。
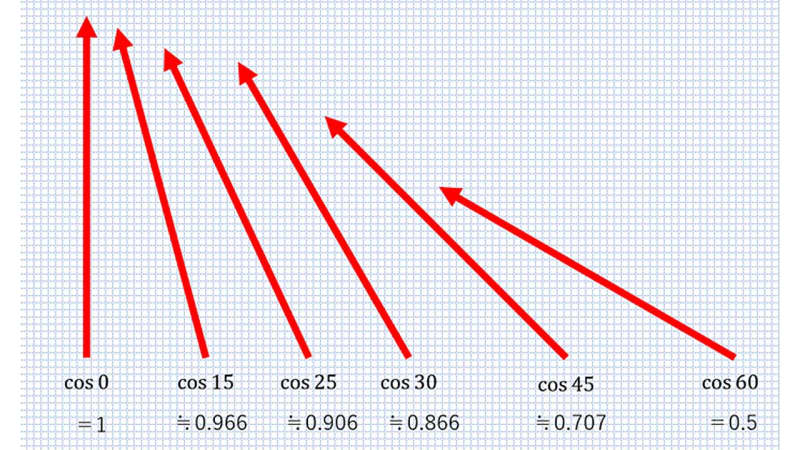
15°の時は推力に対して揚力は3.4%程度の減少であるが、30°の時は13.4%の減少となる。45°では29.3%の減少となり、60°に至っては半分まで減少してしまい、機体重量によっては揚力が保てず墜落してしまう可能性がある。
また、最初に示した揚力発生原理から考えると、ある一定の角度を超えると、上下での気圧差が生じなくなるため、揚力が発生しない状態(失速)になるので検証も必要になってくる。
このようにマルチコプターの揚力に関しては、プロペラ配置構造や動作原理の観点で非常に不利に働く形となっており、中大型のドローンであればあるほど、機体重力は大きくなっていくことから揚力の力は大きくなる必要があり、その揚力が変化を受けやすい状況は、飛行の安定性の維持に関して難しい要因となっている。
モーター
次の要因はモーターだ。
日本はモーター産業に強みがあると思われており、実際も世界に名だたる企業が揃っている業界であるのだが、モーターにも様々な方式や機構、サイズ、用途がある。その中で小型モーター、精密モーターや工業製品用モーターといった分野でのシェアは高い。
ドローンのモーターに関しての特徴は、高回転(5,000r/min以上)、軽量、冷却効率、長時間稼働での信頼性、回転数変動の幅と即時性といったものがある。通常ドローンは1秒間に400回の機体制御プロセスを回し、その結果に基づいてモーターへの電圧の高低をコントロールし、モーターの回転数を制御し、機体制御を行っている。
今までのモーターの中で、ドローンの機構が出現するまで、こういったモーターを求められる機会も少なかったし、現状であっても、モーターメーカーにとっては数量を稼ぐことが難しい領域となっている。その中で、ドローン用のモーターとして現状圧倒的なシェアがあるのは中国となっている。
そして、中大型のドローンにとっては、小型ドローンではあまり考慮する必要がなかった(余裕があった)部分の一般的なモーター特性として、「回転数を上げるとトルク(回転する強さ)が低下する」特性がある。中大型ドローンの場合、回転数を急に上げようとするケースとしては、風などの影響によって傾きが過剰になり、それを戻すといったケースがあるが、こういったケースの場合にモーターが機能しない可能性が出てきてしまうということだ。
eVTOL用のモーターを開発しているデンソーのHPにはeVTOL用モーターのポイントとして以下が記載されている。
- モーターと電気回路の軽量化
- 回転する力(トルク)が大きい状態を維持して長時間駆動できる信頼性
- 高速回転により発熱するモーターを冷却するシステムの効率化と軽量化
デンソーはこのモーターを開発するにあたり、特許出願を行っている(特に構造上の特許となっている)。また、モーターの電気制御に使うパワー半導体も自社開発し、軽量化と冷却効率の改善を進めている。中大型ドローンに関して、モーターもまだ開発途上にあり、耐久性などを考慮すれば、まだまだ整っていない環境だ。
バッテリー
最後はバッテリーだ。
既にeVTOLの業界においては、「現状のリチウムイオン/リチウムポリマー電池の性能は、eVTOLビジネスを本格展開していくのには不十分(eVTOL機の事業化を目指して開発を進めているホンダのコメント)」といった認識が常識化している。
JUIDA副理事長の千田泰弘氏は、次のようにコメントしている。
千田氏:充電時間はモビリティーの稼働率に直結する。1時間に1回飛ばすにはせいぜい30分で充電しないといけない。現状の電池では充電に時間がかかり過ぎる。
そのため、ガスタービンなどで発電し、それを電池に充電してプロペラを回すという、ハイブリットシステムの開発が世界中で活発化している。
また、ドローン用LiPOバッテリー事業を古河電池に事業譲渡したマクセルは、NEDOのDRESSプロジェクトの助成を受け、同社が開発している「アルジロダイト型固体電解質」という硫化物系の素材を使ったドローン向けの全固体電池の開発を進めている。2030年を目標に事業立ち上げを考えているようだが、現時点のエネルギー密度は120Wh/kgで、電解質に有機溶媒を利用する通常のリチウムイオン電池の先端品が示す250Wh/kgのレベルには到達してはいない。
いずれにせよ、実用に耐えうる中大型ドローンの駆動エネルギーに関しては、まだ何が適正なのかといった結論は出ていない状態だ。
中大型ドローンの行方
こういった環境下でのドローンが大型化していく流れの中で、世界においては、現状の1人用のセスナやヘリコプターを自律化(ドローン化)していく流れが加速化している。現状の1人用のセスナやヘリコプターは既に航空工学的には機体の型式認証や機体認証が通っているため、それを自律化した際の安全性や安定性、セキュリティなどを検証すればよいからだ。利用用途や機能に向けては、非常に合理的なアプローチであり、スピード感もある。
現状のマルチコプターやVTOLでの形状での開発は、こういった状況を勘案する中で、物理法則に則った形での工夫や部材環境に合わせながら、そのサイズや用途、目的をきちんと定めて、開発プランを計画していくことが必要だろう。
例えば、揚力と推進力の効率性を重視した形で分離した動作システムを設計するといったアプローチも重要だ(きっとArduRoverの改造で機体制御できるのではないかと思う)。

