困難な地形では、アンテナやケーブルカーのマストのような構造物の建設には、しばしばヘリコプターを使用してロープで荷物を運搬する必要がある。風によって荷が揺れると位置決めの精度が損なわれるため、地上作業員による正確な手作業が必要だ。
そのため、地上作業員による正確な位置決めが必要となり、コストと負傷のリスクが増大する。このパラダイムに挑戦するため、空中輸送と組み立てを強化するために設計された特殊なマルチローター無人航空機(ドローン)であるGeranosを開発した。
Geranosは、垂直ポールの正確な位置決めにおいて卓越した能力を発揮し、荷物の運搬と精度の革新的な統合によってこれを実現した。
そのユニークなリング設計は、高いポール慣性の影響を緩和し、軽量な2つの部分からなる把持機構は、能動的な力を加えることなく確実な荷物の取り付けできる。
重力に対抗する4つの主プロペラと、横方向の精度を高める4つの補助プロペラにより、Geranosはホバリング前後の包括的な位置・姿勢制御を実現した。
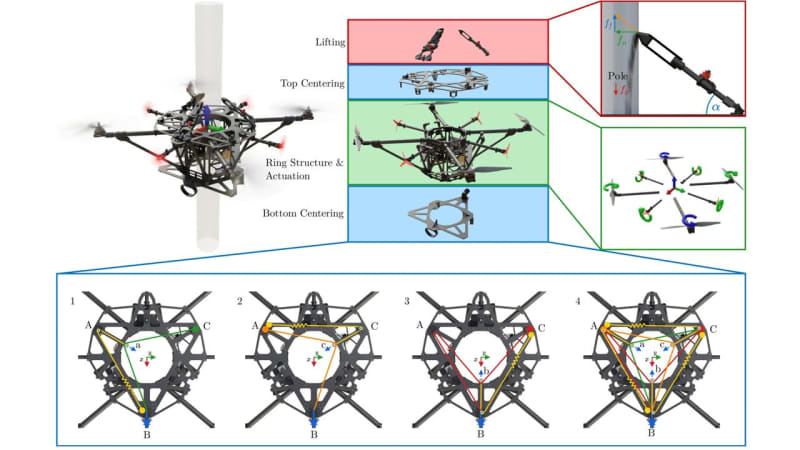
アンテナ/ケーブルカー・マストの設置を模した実験的デモンストレーションでは、人間の手作業を必要とせず、5cm以下の驚くべき設置精度でポール(3kg、長さ2m)を積み重ねるGeranosの能力を示している。
論文はこちら

