この水中ドローンは、オッシュマン工学デザインキッチンで1年間かけて設計・製作されたもので、水中作業において重要な要素である中性浮力を維持するための電力効率に優れた方法だ。
この水中ドローンは、環境モニタリングや海洋調査から軍事・産業作業まで幅広い用途が期待される遠隔操作または自律型水中探査機(AUV)の運用コストを削減する燃料電池ベースの浮力制御装置(BCD)の可能性を示す概念実証の役割を果たし、従来のスラスター駆動のAUVに代わる、より静かでエネルギー効率の高い選択肢を提供するという。
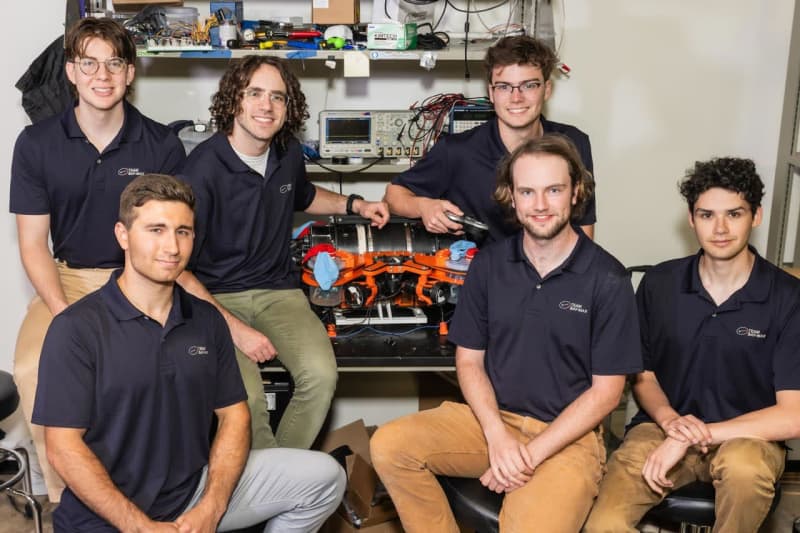
チームBayMax(Andrew Bare, Spencer Darwall, Noah Elzner, Rafe Neathery, Ethan Peck and Dan Zislis)は、ライス大学とヒューストン大学の研究者が発表した、燃料電池を利用した深度制御により、従来のDCモーターベースのスラスター設計と比較して、AUVのエネルギー消費を85%も削減できるという学術論文に基づき、プロジェクトを立ち上げた。ライス大学の機械工学と生物工学の教授で、チームのスポンサーであるFathi Ghorbel氏は、この研究の共著者だ。
Ghorbel氏:BayMaxの学生チームは、電気分解に基づく革新的な研究アイデアの実現に興奮していました。このアイデアは、水を水素ガスと酸素ガスに変換し、魚の浮き袋を模倣してAUVの浮力を制御するものです。この研究は、私の研究室、ライス大学のローラ・シェーファー教授の研究室、ヒューストン大学のチェン・チェン教授の研究室の共同プログラムの一環である。 この共同研究は、可逆的プロトン交換膜燃料電池と水電解槽を利用して体積-質量変換を行うテザーレス連続ソフトエンジンの開発を目指している。この設計プロジェクトを通じて、BayMaxチームは、AUVと物理世界との相互作用におけるこの技術の有効性を証明した。
エネルギー効率が高く、推力ノイズを排除するこの技術は、AUV、マテリアルインテリジェンス、補助ウェアラブルデバイス、適応的で再プログラム可能なロボット衣服、機械としての布地など、幅広い用途があるという。
Andrew Bare氏:私たちにとってクールなのは、この技術が本当に最先端であり、私たちがやっているような方法はこれまでなかったということです。ピッチ・ロールと広範なコントロールを備えた装置にこの技術を実装したのは我々が初めてなので、本当に興奮している。
Rafe Neathery氏:従来の水中ドローンは、スラスターや大型ポンプ、プロペラを使用して深度を変更したり保持したりしている。これらはエネルギー消費量が多く、重量が重く、コストが高いため、問題があります。

BCDは、可逆性水素燃料電池(電気を利用して水を水素と酸素に変えたり、逆に水素を酸素に変えたりする)を風船に組み込むことで、最小限のエネルギー消費で水中ドローンがスムーズに深度を調整できるようにしたという。
Dan Zislis氏:燃料電池に電圧をかけると、蒸留水が燃料電池の基板を通過して2つの気体にイオン化され、装置の浮力を増加させることができます。エネルギーを節約または回復して、装置の浮力を弱めたいときには、電圧を逆方向に送ります。
水素と酸素は自然に引き寄せられて反応し、水を形成するため、逆電解はデバイスが利用できるエネルギーを生み出す。ドローンはまた、システムのバイタルや、さらに重要な水中での装置の位置と向きに関する情報を収集するいくつかの異なるセンサーを内蔵している。この情報はダッシュボードに送られ、コアシステムの情報、ドローンの位置のリアルタイムグラフ、相対的な姿勢のシミュレーション、BCDの起動状態のトップダウンビューが表示される。
Noah Elzner氏:ダッシュボードは私の主要な責任でした。このセットアップによって、水中ドローンの深度から姿勢まで、すべてをリアルタイムでモニターすることができます。
この水中ドローンは、自動安定化アルゴリズムと深度制御を、車両の手動制御と組み合わせている。
Spencer Darwall氏:私たちは実際のビデオゲームのジョイスティックを取り入れました 制御理論を深く掘り下げ、新しいソフトウェアを学ぶことを求められた。 本当にやりがいのあるアウトプットに加えて、素晴らしい学習経験だったと思います。
このプロジェクトは、4月11日にイオンで開催された恒例のハフOEDKエンジニアリング・デザイン・ショーケースで、優れたイノベーションに贈られるウィリー・レボリューション賞の第2位を受賞した。
Ethan Peck氏:今、このプロジェクトに1年を費やし、多くの時間を費やしている。
このチームは、車両工学やロボット工学への共通の興味と、自分たちのスキルを自分の専門外のことで発揮したいという願望から結成された。
Dan Zislis氏:私たちのほとんどは、授業や、大学のロケットクラブであるライス・イクリプスなどのクラブでお互いを知っていました。私たちは、このような野心的で素晴らしいプロジェクトに一緒に取り組む気になりました。
システムの相互依存性の管理は、チームが直面した大きな課題のひとつだったという。
Dan Zislis氏:このようなプロジェクトでは、統合が非常に重要でした。私にとってのもうひとつの収穫は、どんなプロジェクトでも明確なスコープを決めることの重要性です。このドローンでは、いろいろなことに集中することができた。例えば、燃料電池の効率向上やロボットアームの製作に取り組むこともできたはずだ。そうではなく、浮力制御装置という主要部分から焦点をそらさないように、他の要素はシンプルにすることを選んだ。このような意思決定プロセスは、優れたエンジニアリングの一部というだけでなく、人生のあらゆることに関係しています。
チームは、ライス機械工学講師のデイビッド・トレバス氏、ゴーベル氏、電気・コンピューター工学実習のゲーリー・ウッズ教授に指導を受けた。