動物の脳は、GPU(グラフィック・チップ)上で動作する現在のディープ・ニューラル・ネットワークに比べて、データ使用量とエネルギー消費量が少ない。したがって、ニューロモーフィック・プロセッサは、重くて大きなハードウェアやバッテリーを必要としないため、小型ドローンに非常に適しているという。
飛行中、ドローンのディープ・ニューラル・ネットワークは、GPUで動作させた場合よりも最大64倍速くデータを処理し、消費エネルギーは3倍少ない。同大は、この技術をさらに発展させれば、ドローンが昆虫や鳥のように小型で機敏で賢くなる飛躍が可能になるかもしれないとしている。この研究成果は、Science Robotics誌に最近掲載された。
動物の脳から学ぶ:スパイキング・ニューラル・ネットワーク
人工知能は、実世界での応用に必要な知能を自律型ロボットに与える大きな可能性を秘めている。しかし、現在のAIは、かなりの計算能力を必要とするディープ・ニューラル・ネットワークに依存している。
ディープ・ニューラル・ネットワークを実行するために作られたプロセッサー(グラフィック・プロセッシング・ユニット、GPU)は、かなりのエネルギーを消費する。特に飛行ドローンのような小型ロボットでは、センシングやコンピューティングの面で非常に限られたリソースしか搭載できないため、これは問題である。
動物の脳は、GPU上で動作するニューラルネットワークとは全く異なる方法で情報を処理する。生物のニューロンは非同期で情報を処理し、ほとんどの場合、スパイクと呼ばれる電気パルスを介して通信する。このようなスパイクを送るにはエネルギーがかかるため、脳はスパイクを最小限に抑え、疎な処理になる。
このような動物の脳の特性にヒントを得て、科学者やハイテク企業は新しいニューロモーフィック・プロセッサを開発している。これらの新しいプロセッサーは、スパイキング・ニューラル・ネットワークの実行を可能にし、より高速でエネルギー効率の高いものになると期待されているという。
博士課程の候補者であり、この記事の著者の1人であるジェシー・ハゲナーズ氏は、次のようにコメントしている。
ハゲナーズ氏:スパイキング・ニューラル・ネットワークで実行される計算は、標準的なディープ・ニューラル・ネットワークで実行される計算よりもはるかに単純です。これにより、スパイキング・ニューラル・ネットワークはより速く、よりエネルギー効率が高くなります。
その理由を理解するには、人間も6.25×3.45+4.05×3.45を計算するよりも、5+8を計算する方がずっと簡単だと感じることを思い浮かべてください。
このエネルギー効率は、ニューロモルフィック・プロセッサがニューロモルフィック・カメラのようなニューロモルフィック・センサと組み合わせて使われれば、さらに高まるという。このようなカメラは一定の時間間隔で画像を作成しない。その代わり、各ピクセルは明るくなったり暗くなったりしたときだけ信号を送る。
このようなカメラの利点は、動きをより素早く認識でき、エネルギー効率が高く、暗い環境でも明るい環境でも機能することだ。さらに、ニューロモーフィック・カメラからの信号は、ニューロモーフィック・プロセッサ上で動作するスパイキング・ニューラル・ネットワークに直接送り込むことができる。これらを組み合わせることで、自律型ロボット、特に空飛ぶドローンのような小型で機敏なロボットを実現する大きな力となるとしている。
ニューロモルフィック視覚と制御による初の飛行ドローン
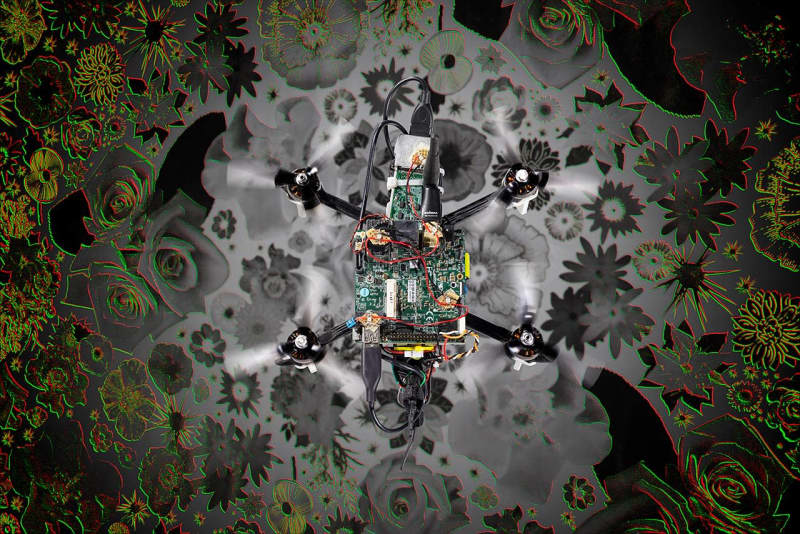
2024年5月15日付のScience Robotics誌に掲載された論文で、オランダのデルフト工科大学の研究者らが、自律飛行のためにニューロモーフィック視覚と制御を使用するドローンを初めて実証した。
具体的には、ニューロモルフィック・カメラからの信号を処理し、ドローンの姿勢と推力を決定する制御コマンドを出力するスパイキング・ニューラル・ネットワークを開発した。彼らはこのネットワークを、ドローンに搭載されたニューロモルフィック・プロセッサー(インテルのLoihiニューロモルフィック研究用チップ)上に展開した。このネットワークのおかげで、ドローンはあらゆる方向の動きを認識し、制御することができるのだという。
この研究に携わった研究者の一人、フェデリコ・パレデス=バジェス氏は次のようにコメントしている。
バジェス氏:私たちは多くの課題に直面しましたが、最も困難だったのは、スパイク・ニューラル・ネットワークをどのように訓練すれば、訓練が十分に速く、訓練されたネットワークが実際のロボット上でうまく機能するかを想像することでした。最終的に、我々は2つのモジュールからなるネットワークを設計しました。 最初のモジュールは、動いているニューロモルフィック・カメラの信号から視覚的に動きを認識することを学習します。これは、カメラからのデータのみに基づいて、自己教師方式で完全に独力で行います。これは、動物が自分で世界を認識する方法を学ぶのと似ています。 2番目のモジュールは、シミュレーターで、推定された動きを制御コマンドにマッピングすることを学習します。この学習はシミュレーションによる人工進化に依存しており、ドローンを制御するのに優れたネットワークは、子孫を残す確率が高くなります。人工進化の世代を重ねるうちに、スパイキング・ニューラル・ネットワークは次第に制御が得意になり、最終的にはさまざまな速度であらゆる方向に飛行できるようになりました。 私たちは両方のモジュールを訓練し、それらを統合する方法を開発しました。統合されたネットワークがすぐに実際のロボットでうまく機能したのを確認できたのはうれしかったです。
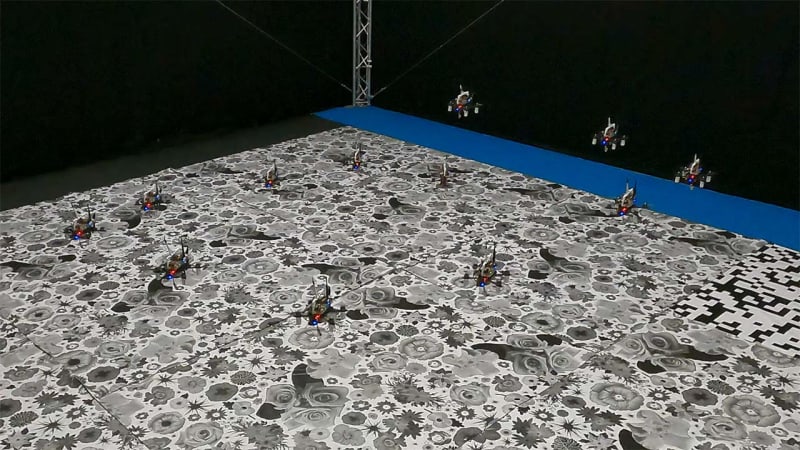
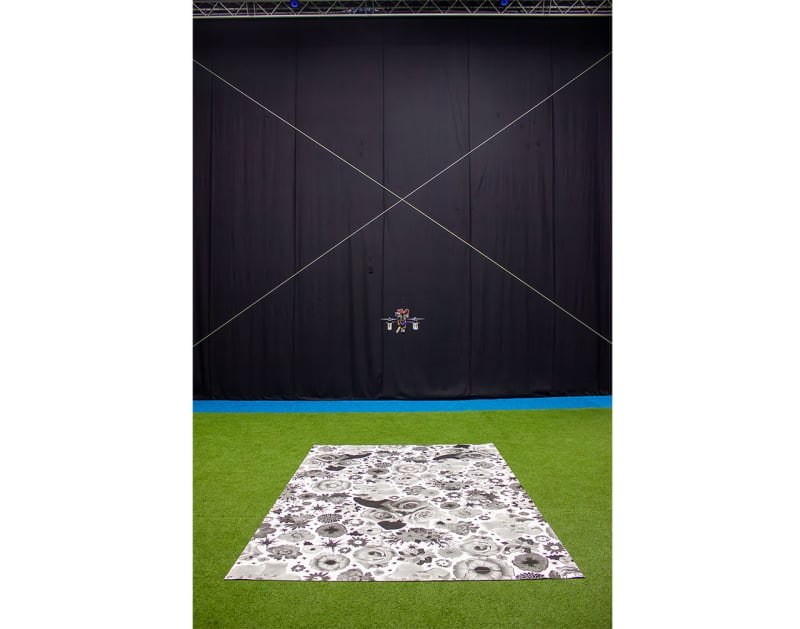
ニューロモルフィック・ビジョンと制御により、ドローンは暗いところから明るいところまで、さまざまな光の条件下でさまざまな速度で飛行することができる。また、光が明滅している状態でも飛行することができ、ニューロモーフィック・カメラのピクセルは、動きとは無関係な信号をネットワークに大量に送信する。
ニューロモーフィックAIによるエネルギー効率とスピードの向上
ニューロモルフィック・ドローン分野の博士候補、スタイン・ストロバンツ氏は、次のようにコメントしている。
ストロバンツ氏:重要なのは、我々の測定結果がニューロモルフィックAIの可能性を裏付けていることです。ネットワークは1秒間に平均274~1600回動作します。同じネットワークを小型の組み込みGPUで実行すると、1秒間に平均25回しか実行されません。 さらに、ネットワークを実行する際、インテルのLoihiニューロモルフィック研究チップは1.007ワットを消費します。ネットワーク自体の実行には7ミリワットしかかかりません。これに対し、同じネットワークを実行する場合、組み込みGPUは3ワットを消費し、そのうち1ワットはアイドル電力、2ワットはネットワークの実行に費やされます。ニューロモルフィック・アプローチは、より高速で効率的に動作するAIを実現し、より小型の自律型ロボットへの搭載を可能にします。
ニューロモーフィックAIの超小型ロボットへの応用
バイオインスパイアード・ドローンの教授であるギド・デ・クルーン氏によると、「ニューロモーフィックAIは、すべての自律型ロボットの知能を向上させる」という。デルフト工科大学の航空宇宙工学部では、温室での作物の監視から倉庫での在庫管理まで、幅広い用途に使用できる小型自律ドローンの研究を行っている。小型ドローンの利点は、非常に安全で、トマトの苗の間のような狭い環境でも航行できることだという。
さらに、ドローンは非常に安価であるため、群れで配備することができる。これは、探査やガス源の位置特定で示したように、より迅速にエリアをカバーするのに便利だとしている。
クルーン氏:今回の研究は、この方向への大きな一歩です。しかし、これらのアプリケーションの実現は、ニューロモルフィック・ハードウェアのさらなるスケールダウンと、ナビゲーションなどのより複雑なタスクへの機能拡張にかかっています。