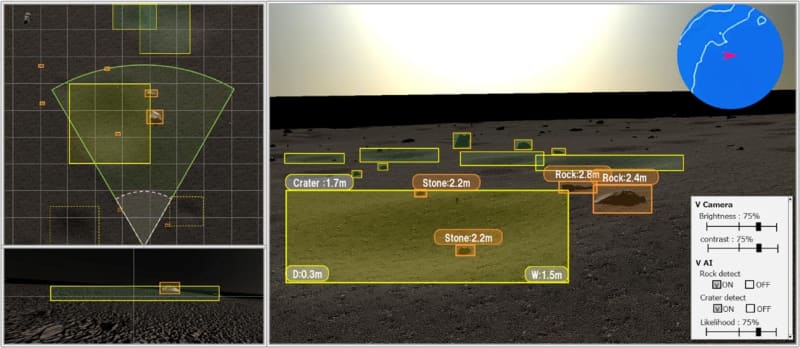
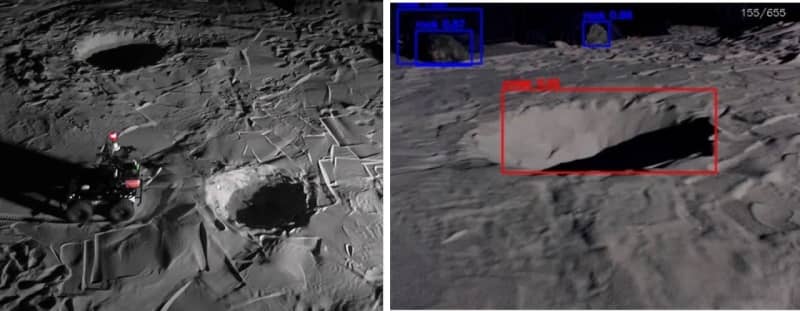
本研究は、宇宙航空研究開発機構(JAXA)が推進する宇宙探査イノベーションハブ 「太陽系フロンティア開拓による人類の生存圏・活動領域拡大に向けたオープンイノベーションハブ」 にて実施した研究成果をもとに、ステレオカメラにより月面探査ローバーの安全な移動の妨げとなる岩石とクレータを障害物として検知する機能を向上させ、月面を環境認識する運転支援システムを試作開発する。
近年、様々なシーンで深層学習による物体検出モデルが活用されているが、その開発には通常、大量の教師データが必要であり、多大な開発コストが課題となっている。
また、災害現場などの危険なシーンへの適応や、宇宙環境のような容易にデータを収集できない場所への適応では、十分な量の教師データを用意する事ができず、AIが必要な性能を発揮しづらいという問題がある。
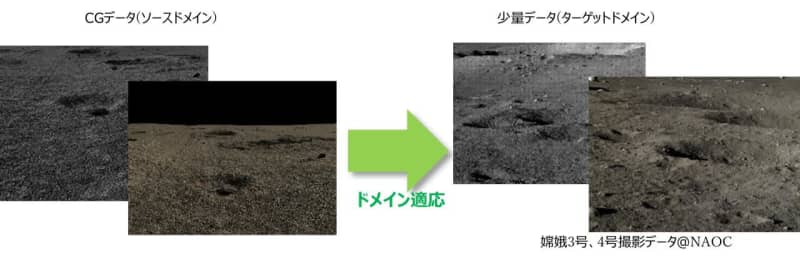
従来から高品質なレンダリングによるCG画像を用いて深層学習する方法があるが、CG画像と実データでは、少なからずギャップが存在するため、CG画像に対して精度の高い深層学習モデルを作成できたとしても、実際の運用環境では精度が低下するドメインシフト問題が発生するという。
本研究では、シミュレータにより大量の月面環境を模したCG画像を生成しソースドメインとして構築し、それに対して少量の月面の実撮影データをターゲットドメインとして、敵対的学習・半教師あり学習を実施しドメイン適応を行うことで、少量の教師データでも精度を低下させない物体検出深層学習手法を試行している。
本研究開発により、低コストで精度の高いAIの開発が可能となり、地上でも教師データが入手困難であると言う理由で今まで普及が進んでいなかった事業領域にもAIシステムを適応できるようになる事が期待できるとしている。
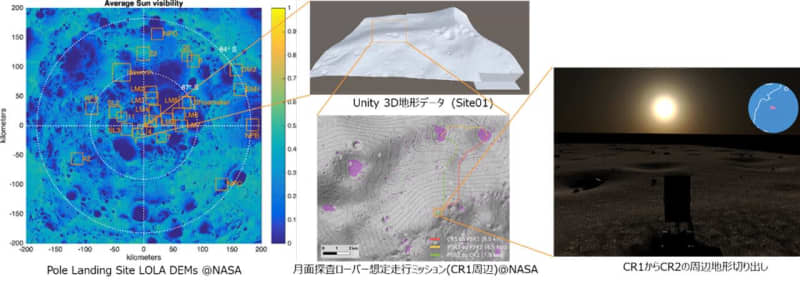
月面を想定した環境認識技術の研究開発においては、月面を再現した仮想環境の構築が重要な要素だ。本研究開発では、NASAより公開されている月面南極域の3Dデータをゲーム開発エンジンUnityに取り込み、そこからアルテミス計画の探査ローバーの走行タスク想定地点を切り出し、横から差し込む太陽光を模擬した3Dシミュレーション環境として構築した。
なお、公開地形データは5m/pixelと分解能が低く、月面探査ローバーの移動の妨げとなる10m以下の小さなクレータや岩石の情報が欠落してしているため、文献を参考に仮想のクレータや岩石を障害物として配置した。
同社にはこれまで車載商品開発において、センシング開発、モデルベース開発、シミュレーション開発のノウハウや実績があり、シミュレータ環境と実機・実環境の両方で評価可能な自動運転開発用共通PFを構築している。
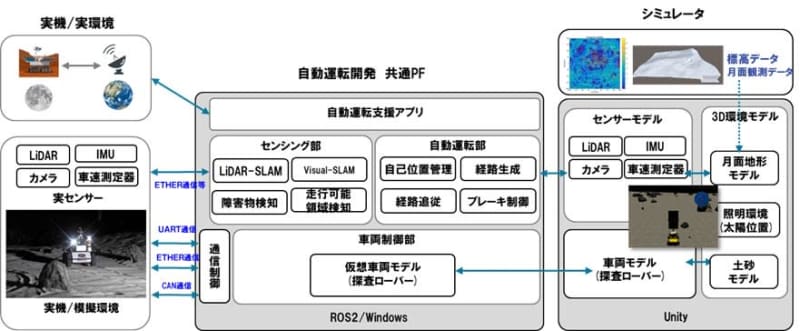
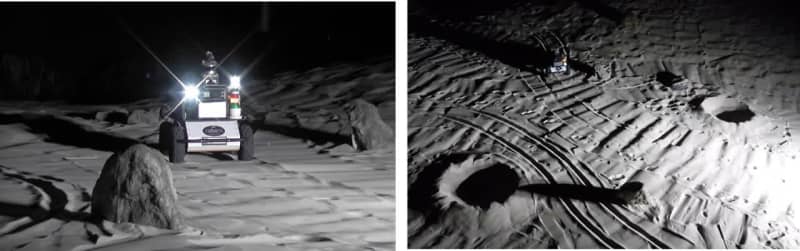
JAXA宇宙探査実験棟の宇宙探査フィールドの模擬月面環境で小型ローバーを使用した走行試験による実証実験を実施している。南極域を想定し、横から差し込む太陽光を模擬した照明環境でロバスト性を評価し、性能改善を進めているという。
同社はさまざまな自律移動モビリティを実現するための技術の確立に向け、今後もさらなる性能改善、ユースケースへの適応を続け、研究開発を推進していくとしている。
