この研究は、ESAのアドバンスト・コンセプト・チームとデルフト工科大学のマイクロ・エア・ビークル研究所(MAVLab)が共同で実施したもので、サイエンス・ロボティクス誌に詳細が掲載されている。
ESAのACTの科学コーディネーターであるダリオ・イッツォ氏は、次のようにコメントしている。
イッツォ氏:長期的なコラボレーションを通じて、我々は、惑星間移動、地表着陸、ドッキングなど、あらゆる種類の要求の厳しい宇宙船操縦の自律的監視のための訓練可能なニューラルネットワークの使用を検討してきました。 宇宙では、推進剤、利用可能なエネルギー、コンピューティングリソース、そして多くの場合時間など、船内のあらゆるリソースを可能な限り効率的に活用しなければならない。このようなニューラルネットワークのアプローチは、ミッションの自律性とロバスト性を高め、最適なオンボード・オペレーションを可能にする。しかし、実際の宇宙ミッションを計画する前に、現実の世界でそれをテストする方法が必要でした。 そこで私たちは、実際のロボット・プラットフォーム上でエンド・トゥ・エンドのニューラル・アーキテクチャをテストし、将来宇宙で使用する際の信頼性を高めるための理想的なジム環境として、ドローン・レースに行き着いたのです。
ESAのパートナーであるデルフト工科大学の航空宇宙工学部が管理する10×10mのテストエリア「サイバー・ズー」内に設置されたコースで、ドローンがベストタイムを競った。人間が操縦する「Micro Air Vehicle」クアッドコプターと、様々な方法で訓練されたニューラルネットワークを持つ自律型クアッドコプターが交互に飛行した。
AACTの若手大学院生セバスチャン・オリガー氏は次のようにコメントしている。
オリガー氏:宇宙船の操縦は、地上で詳細に計画された後、宇宙船にアップロードされて実行されるというのが伝統的なやり方です。基本的に、ミッションの誘導と制御に関しては、誘導の部分は地上で行われ、制御の部分は宇宙船が行います。
しかし、宇宙環境は本質的に予測不可能であり、重力の変動、大気の乱れ、地上のモデリングとは異なる形状の惑星体など、あらゆる種類の予期せぬ要因やノイズが発生する可能性がある。
宇宙船が何らかの理由で計画された軌道から外れるたびに、その制御システムは設定されたプロファイルに戻すように働く。問題なのは、このようなアプローチはリソース面でかなりコストがかかることであり、総当たり的な補正が必要となるという。
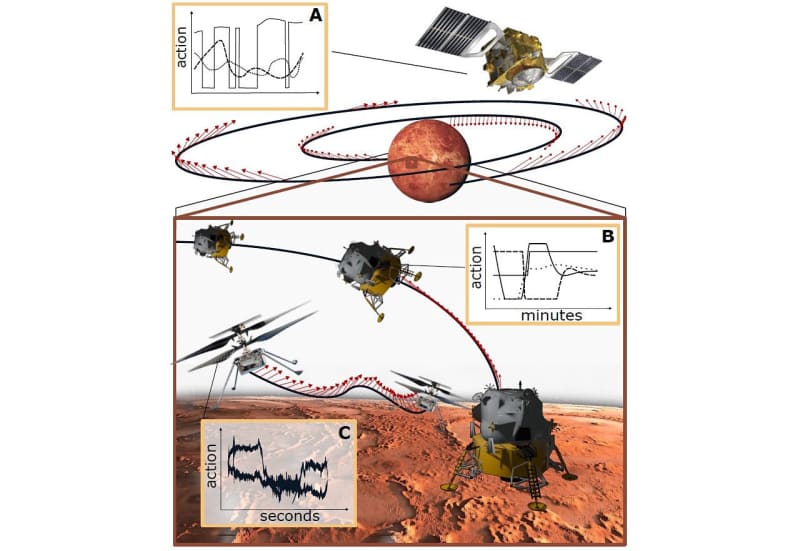
オリガー氏:私たちの代替案であるエンド・ツー・エンドの誘導制御ネットワーク(G&Cネット)のアプローチでは、宇宙船で行われるすべての作業が含まれます。一つの決まったコースに固執する代わりに、宇宙船は現在位置から出発して最適な軌道を継続的に再計画します。これは、はるかに効率的であることが証明されています。

コンピュータ・シミュレーションでは、動物の脳の設定を模倣した、相互にリンクしたニューロンで構成されるニューラル・ネットが、専門家の事例に長時間さらされることに基づく「行動クローニング」を使って訓練されると、良好な結果を示した。しかしその後、現実の世界でこのアプローチに対する信頼をどのように築くかという問題が出てきた。そこで研究者たちはドローンに着目した。
イッツォ氏:ドローンと宇宙船の間には多くの相乗効果がありますが、ドローンの飛行に関わるダイナミクスはより速く、より騒々しいものです。 レースに関して言えば、主な希少資源は明らかに時間ですが、推進剤の質量など、宇宙ミッションが優先しなければならない他の変数の代用として使うことができます。衛星のCPUはかなり制約がありますが、私たちのG&CNETは驚くほど控えめで、おそらく30,000ものパラメータをメモリに保存することができます。

最適にするためには、G&Cネットはアクチュエーターに直接コマンドを送ることができなければならない。宇宙船の場合はスラスター、ドローンの場合はプロペラだ。
デルフト工科大学の主任研究員であるクリストフ・デ・ワグター氏は、次のようにコメントしている。
ワグター氏:G&Cネットをドローンに導入するために我々が取り組んだ主な課題は、シミュレーション上のアクチュエータと現実のアクチュエータとの間のリアリティ・ギャップです。飛行中に現実とのギャップを特定し、それに対処するようニューラルネットワークに教えることで対処します。例えば、プロペラの推力が予想より小さい場合、ドローンは加速度計でそれに気づくことができる。するとニューラルネットワークは、新たな最適経路をたどるようにコマンドを再生成します。

オリガー氏:ドローンレースには学術的なコミュニティがあり、レースに勝つことがすべてです。私たちのG&CNetsのアプローチにとって、ドローンの使用は、実際の宇宙ミッション実証機を計画する前に、信頼関係を築き、しっかりとした理論的枠組みを開発し、安全範囲を確立する方法なのです。
