試験方法や試験環境の妥当性を検証
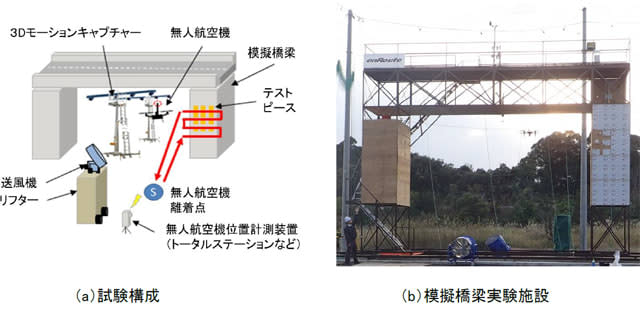
NEDOは、富士通株式会社、日本電気株式会社、株式会社イクシスリサーチ、株式会社エンルート、株式会社プロドローンとともに、昨年10月16日から開始、エンルートが千葉県東金市に開設したドローンフィールド東金の中に設置した模擬橋梁実験施設を使い行われた。この模擬橋梁実験施設を用いて、橋梁点検のための無人航空機の性能評価基準策定に向けた試験方法を検証するための飛行試験を実施した。
事象実験の概要は、無人航空機による近接画像撮影や打音検査などの橋梁点検プロセスを再現し、実際に無人航空機を飛行させ、無人航空機による橋梁点検プロセスに沿った性能評価の試験方法やそこで必要となる計測システムの妥当性を検証した。加えて、特設した送風設備を用いて、無人航空機の飛行安定性の性能評価に必要となる橋梁の支承部※2付近の風などの外乱を考慮した試験環境の妥当性の検証も行った。
実験の結果、橋梁点検における無人航空機の活用に向けた性能評価基準策定に必要となる各種データを取得することができた。NEDOは、今後も性能評価基準の策定に貢献すべく準備を進めていくとしている。
また、昨年11月22日にNEDOと福島県が締結した「福島ロボットテストフィールドを活用したロボット・ドローンの実証等に関する協力協定」の取り組みの一環として、性能評価基準に基づく試験が「福島ロボットテストフィールド」の試験用橋梁で実施できるよう、今回の試験から得られた知見を福島県へ提供していく。

飛行試験の内容
1) 無人航空機による橋梁点検プロセスに沿った性能評価の試験方法の検証に関する飛行試験
無人航空機による高橋脚上部や床版の近接画像撮影、高橋脚の打音検査などのための橋梁点検プロセスやそこで必要となる計測システムの妥当性を検証するために、無人航空機を飛行させ、準備から点検作業終了までの所要時間と点検時の環境条件(天候・風向・風速・照度など)のデータを取得するとともに、画像や打検器接触位置・姿勢などのデータを取得した。
(2) 橋梁支承部における風などの外乱を想定した性能評価の試験環境の検証に関する飛行試験
特設した送風設備を用いて、橋梁支承部およびその近傍における安全な運用を阻害する風などの外乱を考慮し、その環境下で無人航空機を飛行させ、無人航空機の姿勢制御性能を定量化するなど、飛行安定性の性能評価に必要となる試験環境の妥当性の検証を行った。



