
デンソーウェーブとドイツのベッコフオートメーション(以下、ベッコフ)は、12月18日、東京ビッグサイトで開催されている「2019国際ロボット展(iREX2019)」にて共同会見を実施。両社が共同開発した新しいコンセプトのロボットコントローラー「RC9」の背景や目的について説明した。
iREX2019会場、デンソーウェーブの展示ブースにて。左からベッコフオートメーション株式会社 代表取締役社長 川野俊充氏、ベッコフオートメーション 制御システム&通信アーキテクチャ部門 シニアマネジメント トーマス・レティグ氏、同社コーポレートマネジメント ゲルト・ホッペ氏、デンソーウェーブ株式会社 代表取締役社長 中川弘靖氏、同社執行役員 FA・ロボット事業部 事業部長 神谷孝二氏、同社FA・ロボット事業部 製品企画室 室長 澤田洋祐氏。
リアルタイムOS「TwinCAT」の採用で、オープン性を強化
ロボットコントローラー「RC9」の共同開発の背景について、デンソーウェーブ 執行役員 FA・ロボット事業部 事業部長の神谷孝二氏は次のように述べた。
「ロボットの低コスト化の要求が高まっている。その一方で、インテリジェント化、IoT化といった付加価値の向上やアプリケーションの複雑化も求められている。こうした状況の中、ロボットコントローラーが進化すべきポイントは3つあると考えている」
その3つとは、(1)アプリケーションに応じて最適化できる選択性、(2)世の中の他の技術とうまく融合できるオープン性、(3)ロボットのみならず、工場のシステム全体をシンプルに統合できる拡張性だという。そして、この3つに対応するために開発されたのが、「RC9」である。
ロボットコントローラーは従来、産業用PC(以下、IPC)とドライバー、つまりハードウェアとソフトウェアが一体のオールインワン型だった。しかしこの場合、ロボットの用途が変わり、より高いハードウェア(CPU)の性能が必要になると、コントローラーをまるごと変えなければならない。しかも、複数台のロボットを制御する場合、それぞれのロボットコントローラーに制御プログラムを書き込んでおく必要があった。
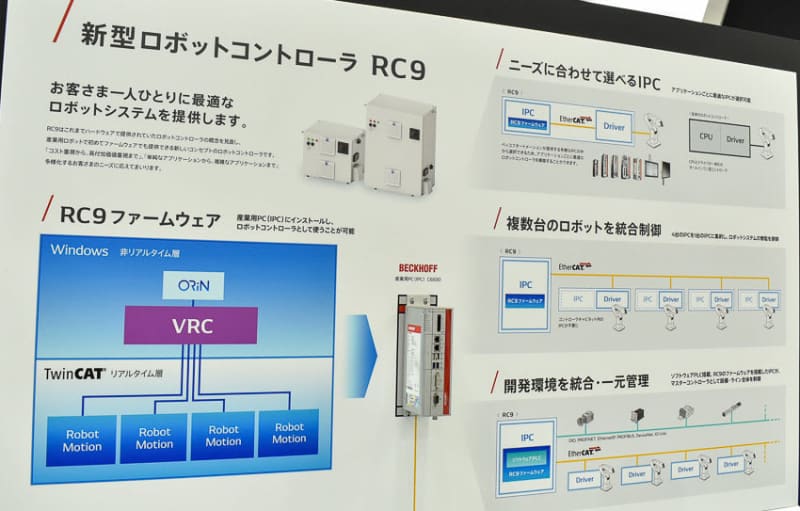
そこで、「RC9」はコントローラーとドライバーを分離し、ベッコフ製のIPCにインストールできるファームウェアとして開発、ロボット側にはドライバーのみが搭載される。そして、ロボットのリアルタイム制御を行うためのOSとしては、ベッコフの「TwinCAT」が新たに採用された。
これにより、デンソーウェーブのロボットユーザーは、ベッコフの多様なIPCのラインナップの中から、処理性能に応じた製品を選択することができる。また、一つのIPCから複数台のロボットの統合制御が可能(最大4つまで)となる。「RC9は単なるロボットコントローラーではない。ロボットシステム全体を制御するコントロールとして進化した」(神谷氏)。
また、RC9を使うことで、ロボットのみならず、PLCなども含めた、設備全体の統合制御を行うことも可能となる。デンソーウェーブ FA・ロボット事業部 製品企画室 室長の澤田洋祐氏は、「RC9によって、設備を一元管理できる。つまり、RC9はロボットのコントローラーであるのみならず、設備機器のマスターにもなる。ソフトウェアPLCをインストールすることで、あらゆるデバイスをIPC1台で制御できるように、RC9は進化した」と述べた。

ベッコフは、産業領域のPC制御を専業とするドイツの制御機器メーカー。産業用PC(IPC)の出荷台数は21万7,000台にもおよぶ。産業用の高速通信ネットワーク「EtherCAT」の生みの親でもあり、同社が事務局をつとめる「EtherCAT Technology Group」には、世界で5,650社が会員となっている。
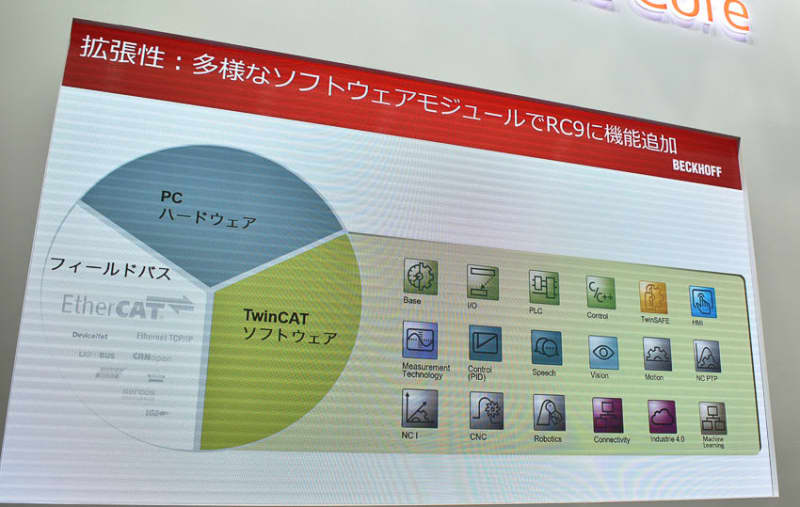
同社のコアテクノロジーの一つが、今回、デンソーウェーブが「RC9」のリアルタイムOSとして採用した「TwinCAT」である。ベッコフ コーポレートマネジメント ゲルト・ホッペ氏は、「TwinCATは拡張性の高さが特徴。PLCやモーションコントロールをソフトウェアのモジュールとして一つのIPCに実装できる。こうした拡張性の高さが、デンソーウェーブが当社を選んでくれた決め手の一つだと考えている」と述べた。
また、ベッコフは、日本国内で広く使われている産業用ネットワーク「CC-Link」にも対応できるゲートウェイを新たにリリース。これにより、RC9のユーザーは、CC-Linkネットワークを通じて、ロボットやデバイスを制御することも可能になる。
iREX2019の展示ブースでRC9による統合制御のデモラインを披露
「RC9」は、2020年7月に発売予定の新型産業用ロボット「VM」、「VL」から採用され、今後発売される製品にも順次搭載されることになっている。今回、デンソーウェーブは同展示ブースにて、「RC9」によって「VM」などのロボットを統合制御したデモラインを披露した。

登場するロボットは5台で、そのうち2台は「VM」と「VL」。残りの3台は従来機で、ロボットコントローラーは「RC8」を用いている。このとき、「VM」を制御する「RC9」が同時に3台の「RC8」を通して、3台のロボットを制御している。「RC9」は従来型のロボットコントローラーである「RC8」を「RC9化」し、制御する機能をそなえている。
なお、「VM」は6軸の垂直多関節ロボットで、搬送やパレタイジング(荷物の上げ下ろし)向けだ。また、ロボットの動作の拡張性をひろげるため、機内配線として「EtherCAT」が通されている。そのため、外から配線をはわせずに、カメラやデバイスを装着することができる。デモラインでは、「VM」は同社の人協働ロボット「COBOTTA(コボッタ)」をつかみ、箱の中に詰める作業を行っていた。

デンソーウェーブの神谷氏は、今回のベッコフとの協業について、「当社は、ORiNを中心に、ロボット制御のオープン性を重視してきた。そのORiNの強みを活かすためにも、ベッコフのIPCによるオープン性の強化が重要だと考えた――ベッコフの技術の進化が、当社の進化にもなる。また、ロボットメーカーが注力すべきは、オープンな環境で使える便利なコンテンツや簡単化のしくみ、インテリジェンスをみがくことにある。そうしたロボット本来の機能を強化することや、安全性を高めることに今後はさらに注力していきたい」と述べた。
なお、本稿とは別にベッコフのゲルト・ホッペ氏への個別インタビューも行っている。その記事は別途お届けする。

