
デンソーウェーブは、「2019国際ロボット展(iREX2019)」(12月18~21日、東京ビッグサイト)において、産業用ロボットの設計やプログラミングの作業負担を軽減するアプリケーション「WINCAPS Plus」を披露した。
ロボットを誰でも簡単に扱えるツールが求められている
人が隣で作業しても安全な「人協働ロボット」の登場に伴い、ロボットの活用シーンは大きな広がりを見せている。利用が見込める現場は、工場に限らず研究を行う実験室やオフィス、飲食店、スーパーなど、様々だ。しかし、どんなに便利なロボットがあっても、ユーザーがそれをうまく使いこなせなければ意味がない。
通常、ロボットを動かすには、プログラムを書く必要がある。「A地点からB地点まで動かし、そこにある物体をつかむ」といった簡単な動作でさえ、「プログラム言語」を使って長く複雑なスクリプトを書かなければならない。実物の動きとスクリプトの内容は直感的には結びつかないものであり、専門ではない人からするとかなり難しい。
そうした中、直感的にロボットを動かす方法として登場したのが、「ダイレクトティーチング」だ。作業者がロボットの腕などを直接つかんで動かし、その動作をロボットに記憶させるという方法である。これならある程度、誰にでもできる。
たとえば、デンソーウェーブの人協働ロボット「COBOTTA」専用のユーザーインターフェース「Cobotta World(コボッタワールド)」を使えば、ダイレクトティーチングによって簡単に「COBOTTA」に動作を覚えさせることができる。
しかし、この方法にも限界がある。ある程度複雑な動作を覚えさせようとすると、どうしても制限がかかってしまうのだ。
そこで、デンソーウェーブが新たに開発したのが、「WINCAPS Plus」とよばれるアプリケーション群である。これは、同社のロボットシミュレーションソフトウェア「WINCAPSⅢ」に併用できるアプリケーション群で、ロボットを扱う作業者の負担を軽減するために開発された。デンソーウェーブ FA・ロボット事業部 製品企画室 担当課長 榎本聡文氏は、「この製品は、(ある程度複雑なロボットの動作を必要する状況において)『プログラマーではないエンジニア』を主に対象としている」と述べた。
「WINCAPS Plus」で提供される、3つのアプリケーションを紹介

本稿では、2020年7月の販売時に「WINCAPS Plus」で提供される5つのアプリケーションのうち、3つを紹介する。一つ目は、視覚的にロボットに動作を覚えさせる「3D visual programming」だ。
「ダイレクトティーチング」では、実物のロボットを動かすことで、動作を覚えさせる。しかし「3D visual programming」では、3DCADで表現された3次元のシミュレーション空間の中で、ロボットを動かす。たとえば、コンピュータのマウスのクリック機能を使ってA地点からB地点までを指示するだけで、その経路通りにロボットを動かせる(上の画像・右)。

次は、「最適経路計画」だ。開始地点と終了地点を指定するだけで、ロボットは障害物を回避し、サイクルタイムの最も短い経路を自動生成して、動作する。
この場合も、「3D visual programming」と同様、ロボットやその周囲の状況をデジタルツイン、つまり3DCADのシミュレーション空間に構築しておく必要がある。ロボットは、そのデジタルツインの情報にもとづいて最短経路を導き、「そこにあるであろう」障害物をよけながら、ゴールへと向かう。従来は、ユーザーの経験に頼りがちだったロボットの経路設計を自動的かつ精確に生成できるため、熟練者と初心者が同じパフォーマンスでロボットを動かすことができる。
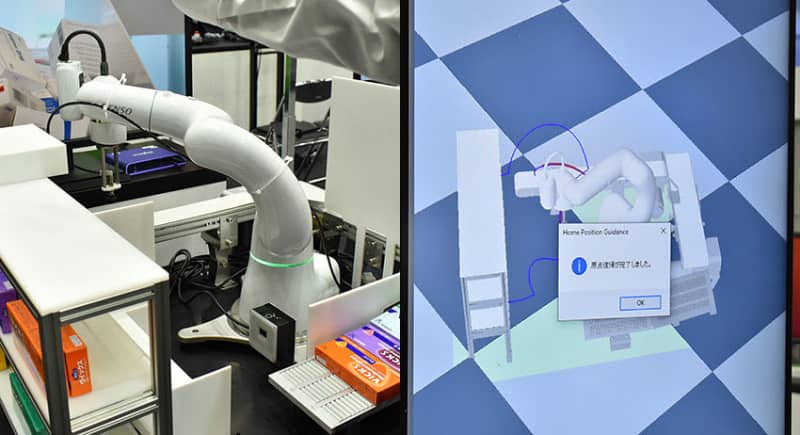
最後に紹介するのが、「原点復帰ガイダンス」だ。ロボットは、しばしば動作中に、何らかのトラブルにあって停止する。たとえば、棚にモノを置こうとして、障害物にひっかかる。そこから元の地点に戻ろうとすると、的確に原点復帰を行うための経路をあらためてプログラミングしなければならず、大きな手間だった。
しかし、「原点復帰ガイダンス」を使えば、ロボットは自動収集した動作経路をたどり、安全に原点に戻ることができる。この場合は、先述の2つのアプリケーションのようにデジタルツインは必要なく、ロボットはそれまでに実世界で何の問題もなく通った経路を記憶することで、原点復帰の経路を生成するのだ。「デジタルツインとリンクさせることもできる。しかし、デジタルツインを前提とすると、ユーザーのコスト負担が大きくなる。広くロボットを活用してもらう場をつくるには、リソースは最小限におさえたい。『原点復帰ガイダンス』は、実世界の動作を覚えることで原点復帰を可能にするため、価格もリーズナブルになっている」(榎本氏)
「WINCAPS Plus」は2020年7月から販売予定。上述の3つを含む、5種類のアプリケーションが早速利用できるが、その後も新しいアプリケーションが順次追加されるようだ。

