
オムロンは、「2019国際ロボット展(iREX2019)」(12月18日~21日、東京ビッグサイトで)において、段替えにともなうこまかい部品のズレを自動で吸収し、組付けを行う新しいロボット技術を披露した(開発中)。
新技術でマスカスタマイゼーションに対応
工場の現場では、製造する品目に対して最適な生産ラインを構築する。そして、品目が変われば段替えを行い、その別の品目に対して最適な生産ラインをつくる。一品一様のカスタム製品を大量生産の生産性で実現する「マスカスタマイゼーション」が求められる昨今、この段替えにともなう設備機械やロボットの動作の調整が、生産技術の担当者を悩ませている。

たとえば、ロボットがこまかい部品の組付けを行う工程。段替えにともない、ロボットの制御プログラムを変更し、最適な作業を行えるように調整する。デジタルツイン技術などの進展により、そうした作業はスムースに実現できるようになりつつはある。
しかし、どうしても小さな部品のズレが発生する。たとえそれが数ミクロンでも、ロボットの不具合や不良品の発生につながってしまう。そのため、時間をかけてロボットの制御をこまかく設定しなおす必要がある。しかし、段替えを行うたびにそれを行っていては、生産技術の担当者にとってあまりに大きな負担だ。
そこで、オムロンが開発しているのが、ロボットが自律的にこまかい部品のズレを吸収し、部品の組付けを行う技術だ。
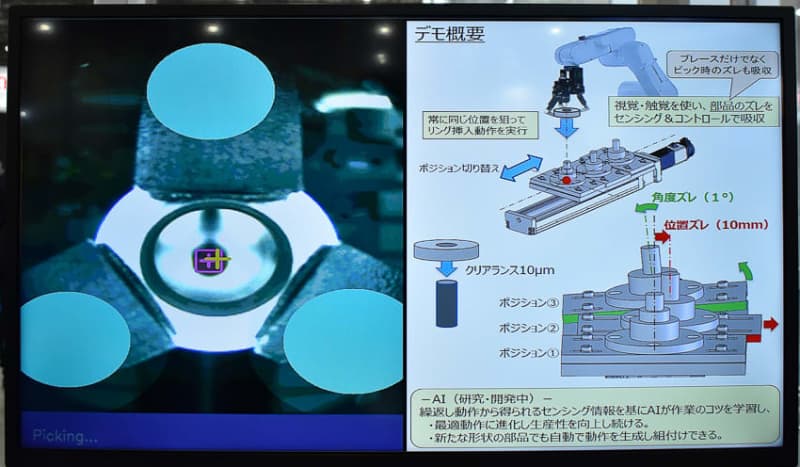
ロボットは、まずカメラで組付けを行う部品の位置を特定する。そして、3つの「指」でリング状の部品をつかみ、筒状の部品にはめる。このとき、リングを持ったまま筒状の部品に触れると、その部品が置かれている位置や角度のズレに応じて、リングがかたむいたり、ずれたりする(「指」はバネ状のやわらかい部品からできている)。
「指」にはモーターとエンコーダが搭載されており、ロボットはそのズレの具合を検知し、リングをうまくはめることができる。人が指先の感覚でこまかい作業をたくみに行うのと似た原理である。なお、ロボットには「眼」の役割をになうカメラも搭載されている。カメラでも10 mm程度のズレなら調整できるが、1~10ミクロン単位のクリアランスまでは吸収できない。
この技術があれば、ロボット自体に数ミクロンの精度はなくてもいい。また、製造する品目が変わるたびに、ロボットの設定をこまかく調整する必要がなくなるのだ。
また、オムロンは、こうした「指先」の繰り返し動作から得られるセンシング情報をAIに学習させ、「形状の異なる部品」に対しても自動でクリアランスを吸収し、組付けできる技術も研究開発中だ。

