
高精度な地図を作り、他社と共有する

今回の実証実験では、専用の計測車両を使用せずに、衛星や一般車両から得られる画像データなどを元にして、自動運転用の地図情報を生成。また、TRI-ADの自動地図生成プラットフォームであるAutomated Mapping Platform(以下 : AMP)上の車両データの形式を変換し、アルゴリズムを補正することにより、他社のプラットフォームで活用する2点を検証。いずれも自動運転に必要高精度地図(相対精度 : 50cm程度以下)の生成に有効であるという結果を得た。
これらの実験成果を活用することで、自動運転用地図の更新期間の短縮、エリアの拡大、作成および維持コストの大幅な削減が期待される。
地図を作るため、4つの実験や検証
衛生画像から地図を作る実験


一般的なドライブレコーダーから地図を作る検証

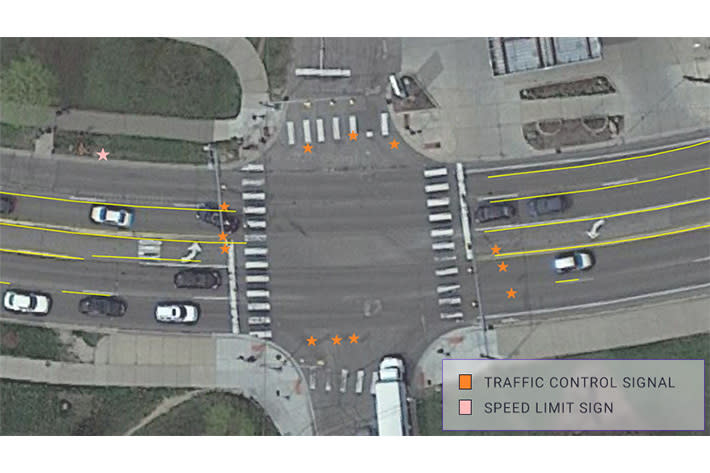
車線など一般道情報を作る実験
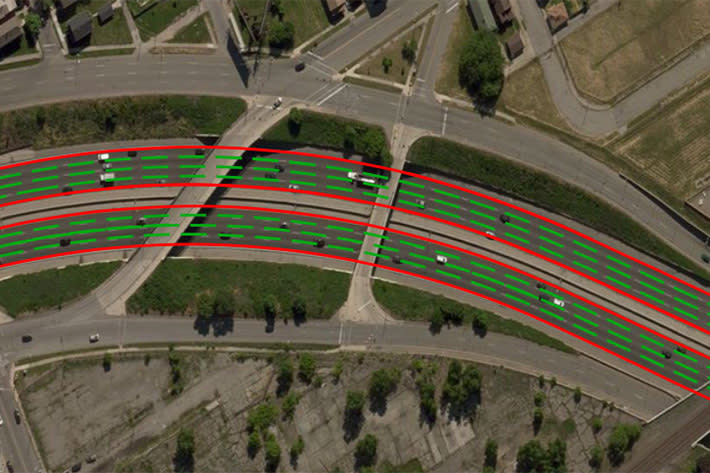
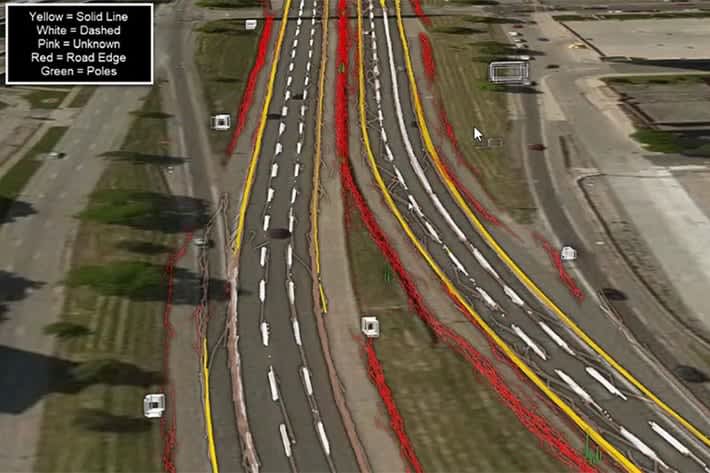
自動で一般道高精度地図を作る実験
地図生成の協力企業
■トヨタ・リサーチ・インスティテュート・アドバンスト・デベロップメント株式会社
■マクサー・テクノロジーズ社(Maxar)
■株式会社NTTデータ
■CARMERA
■TomTom
■HERE

