日本時間2月15日、ロシアの国営宇宙企業ロスコスモスは国際宇宙ステーション(ISS)に向けて無人補給船「プログレスMS-16」を打ち上げました。プログレスMS-16は打ち上げ2日後となる日本時間2月17日にISSへのドッキングに成功し、食料や水、生活必需品、修理キットなど合計2.4トン以上の物資が届けられました。
プログレス補給船は自動および手動でのドッキングに対応していて、普段は「クルス(Kurs)」と呼ばれる自動ドッキングシステムが用いられています。しかし、プログレスMS-16は最終アプローチ中にシステムが手動ドッキング用の「TORU」へと自動的に切り替わったため、問題が生じた場合に備えて待機していたISS滞在中のセルゲイ・リジコフ宇宙飛行士による手動での遠隔操作でドッキングが行われました。ISSのTwitter公式アカウントではシステムが切り替わった理由として、クルスシステムの信号強度に言及しています。

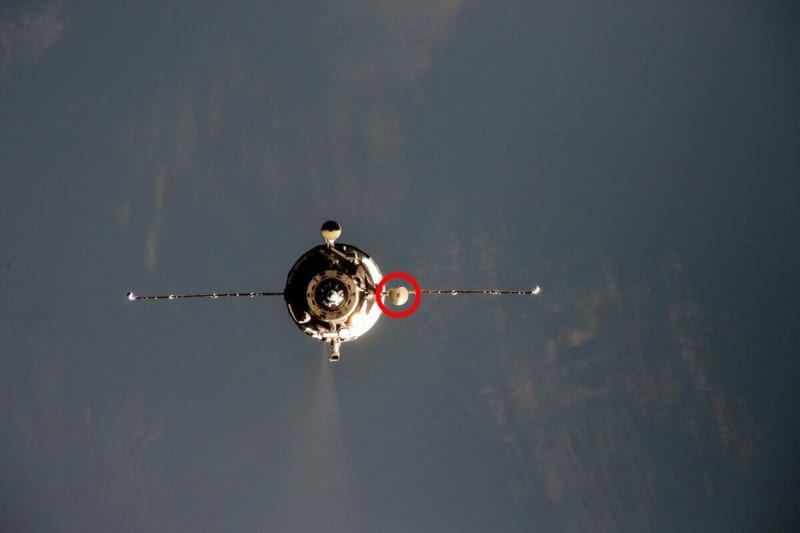
ロシアのタス通信は現地時間2月18日、プログレスMS-16に備わっているアンテナが損傷していたためにドッキングシステムが自動から手動へと切り替わった可能性を報じています。アメリカ航空宇宙局(NASA)から公開されているプログレスMS-16の写真(冒頭に掲載)を確認すると、たしかにクルスシステムを構成するアンテナのひとつが損傷しているように見えます。
報道では関係筋からの情報として、打ち上げに使われたソユーズ2.1aロケットのフェアリング(人工衛星や宇宙船などの搭載物を保護するロケット先端部分のカバー、打ち上げ中に分離される)がアンテナ損傷の原因となった可能性が伝えられています。また、2020年7月に打ち上げられて自動ドッキングに成功した補給船「プログレスMS-15」も、許容範囲内ではあったもののドッキング時に機体がわずかに右へずれていたと報じられています。
RIAノーボスチは現地時間2月17日付で、プログレスMS-15で問題が生じたことを受けてソユーズ2.1aロケットのフェアリング内部には5台のカメラが取り付けられていたと報じており、今回の打ち上げ時の映像をもとに原因を分析するとしたロスコスモスCEOドミトリー・ロゴージン氏のコメントを伝えています。結果的にプログレスMS-16は無事ISSにドッキングできましたが、今後のISSへの物資補給に影響が及ぶことのないよう、原因の究明が待たれます。
関連:ロシアのプログレス宇宙船、ISSへ物資を補給 ISSへの到着は日本時間2月17日
Image Credit: NASA / Roscosmos
Source: タス通信 / RIAノーボスチ / NASA
文/松村武宏
