使用したエアロセンス製、非GNSS環境対応自律飛行ドローン(エアロボインスペクション)。100W高輝度照明とAPS-Cサイズセンサーを搭載したジンバルカメラを搭載
エアロセンス株式会社と一般財団法人日本海事協会は、自律飛行ドローンを用い、甲板下にある貨物を積む船艙内における船舶貨物の検査(艙内検査)の実証実験を実施した。
エアロセンスは、GPS等の電波の入らない環境で自律飛行可能かつ暗所対応可能な非GNSS環境対応点検ドローン、エアロボインスペクション(Aerobo Inspection)を開発した。
このエアロボインスペクションを用いて、船舶および船舶を模擬した暗所屋内にて、予め設定しておいた経路を元に自律飛行で撮影を行い、船舶の検査に有効活用可能な写真データを取得し、3D点群データおよびオルソ画像を生成した。この機体には、GNSSの代わりにカメラで撮影された映像から環境の3次元情報と機体の位置姿勢を同時に推定するVisual SLAM技術を用い、高輝度照明を搭載している。
日本海事協会は、100年以上におよぶ船舶での検査の経験を活かし、自律飛行ドローンの検査への適用の実現性に関するレビューやドローンを用いた検査ワークフローの分析を行った。
■船舶内での検査現場の課題
船舶内での検査現場は一般に以下の3つの課題がある。
- 高所、狭所、屋内での検査
- 暗所での検査
- 地磁気の問題
1.高所、狭所、屋内の検査
船舶内の検査の現場では人手と時間がかかっていた。人が確認する際、危険な場所も多く細心の注意が必要なため、無人で検査ができるドローンの活用が期待されている。通常の自動飛行ドローンでは屋内のGNSS電波の届かない環境でドローン自身の位置の認識(自己位置推定)ができないため、一般には高度な操縦技術を持つパイロットが必要だという。
今回の共同開発では、GNSS電波の入らない環境でも自己位置推定が可能なドローンを用いて、飛行経路を事前に決め手入力しておくだけで、完全に自動で検査を完了することを確認。
今回開発した検査用ドローン(エアロボインスペクション)では、非GNSS環境下でも自律飛行が可能な機能や性能を有している。この機体は、GNSSの代わりに複数方向より撮影したステレオカメラ映像から、環境の3次元情報と機体の位置姿勢を同時に推定するVisual SLAM技術によって、機体の自己位置や向きを認識している。
2.暗所の検査
Aerobo Inspection on Dark site with vSLAM and Light(Aerosense Inc.)
船舶内は照明がつけられない暗所も多く、暗所の中で検査作業が行えることがロボットを用いた検査の重要な要件だった。機体に高輝度照明を設置し、機体のバッテリーから100W供給することで、予備電源なしに検査用のカメラとVisual SLAM用のステレオカメラに必要な光量を確保できることが確認。


実際に機体の照明のみでVisual SLAMにより自律飛行や障害物検出を行いながら、全自動での検査対象の撮影を行うことが確認できた。

3.地磁気問題の解決
Autonomous Surveying ship cargo hold with vSLAM drone by Aerosense Inc.
ドローンを用いる際の問題として地磁気問題があった。一般に、ドローンは地磁気を用いて向きを認識するが、船舶のような鉄の塊の中は地磁気が安定せず、自動飛行や簡易操縦ができない。

今回はVisual SLAMを使うことで地磁気問題を解決しており、その確認のため、実際の船舶の高所で自律飛行実験を行った。通常、ステレオカメラを用いたVisual SLAMの場合、対象物との距離が離れると精度が低下するため、高所での自己位置推定が不安定になることがある。

しかし、エアロセンスが開発したドローン(エアロボインスペクション)を用いた場合は、船舶内の高所を想定して設計されているため、GNSS電波の入らない状態でも安定して自律飛行することができることを確認。Visual SLAMを用いることで地磁気センサーも必要とせず、船舶の検査においても、極めて安定して作業を行えることが確認できた。
■VISUAL SLAMを採用する優位性
GNSS電波の入らない環境でドローンが自律飛行をするためには、IMUと呼ばれる慣性センサーだけでは誤差が大きくなってしまうため、位置情報補正のためにGNSSに代わる自己位置を認識するセンサーが必要になる。一般に自己位置の認識には
- 画像によるビジョンセンサーを用いる方法
- LiDARなどのレーザー測距計を用いる方法
- 外部からのセンシングにより位置情報を機体に送る方法
などが存在するが、同実験ではビジョンセンサーとしてステレオカメラによるVisual SLAMを採用している。ビジョンセンサーを使うことにより、安価でかつ小型軽量な機体にシステムを統合する事が可能。
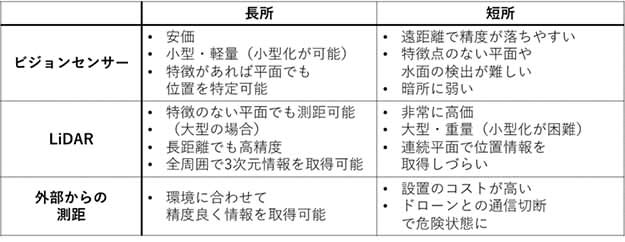
検査用途に求められる要件として小型化は重要な要素になる。また、特徴点があれば、平面の続く場所でも自己位置の特定ができることも利点だという。Visual SLAMの短所である暗所での運用は、独自の100W照明システムを搭載することで解決している。
■ドローンによる検査ワークフロー
開発したドローン(エアロボインスペクション)を用いた船舶検査のワークフローは以下の流れになる。
- ドローンを用いて検査対象を撮影
- 撮り逃しや撮影状態の良し悪しを、現場で簡易ツールで確認
- データ処理用のクラウド(エアロボクラウド)を用いて3次元点群、オルソ画像を作成
- 検査員の見やすい形で詳細確認
- 検査調査報告書の作成

今回、エアロボインスペクションにより、この検査フローを手間やコストを掛けずに行える技術が確立した。今後、自動化を進めることで船員だけで主な検査作業を行えるようにするなど、海事業界発展のための開発を進めていくとしている。

