東大発ロボット開発ベンチャー・株式会社キビテクは、2021年8月26日に株式会社ピーエムティーのオフィス内において、 開発中の高度自律型遠隔制御システム(以下:HATS)の、実環境における試験運用を実施した。
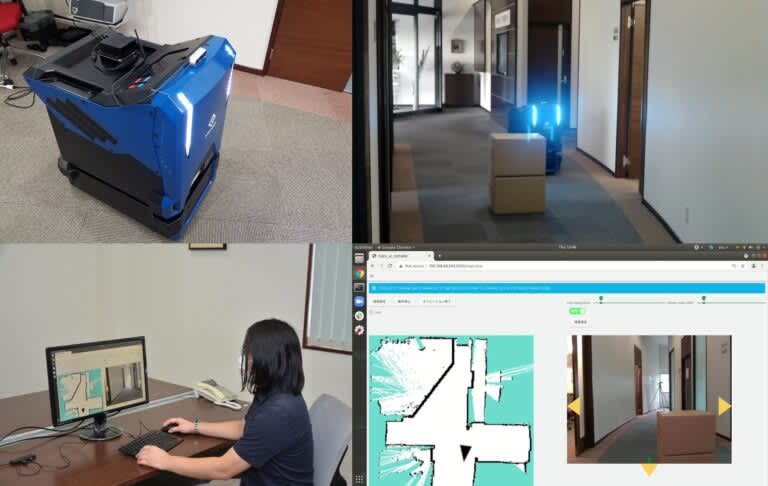
自律走行中のロボットがオフィス内の通路上に置かれた障害物により停止した際、 HATSにより、「ネットワーク経由で遠隔のオペレータに通知→オペレータが状況確認と復旧作業→再び自律走行の状態に戻す」という一連の流れをテスト。
その結果、停止状態にある自律搬送ロボットを、遠隔からスムーズに復旧させ、効率的に運用できることを実証した。
常識や社会的文脈に沿った臨機応変な対応は、AIでは依然として難しい。 それを理由に自律ロボットの導入が実現できなかったり、限定的になってしまうことも少なくない。 既に導入していても、現場でロボットが停止してしまうと復旧作業を要するため、運用効率の向上が課題となっている。
キビテクが開発を進めているHATSは、 既存の自律搬送ロボットにアドオンし、遠隔オペレータが簡単な操作で要点のみをロボットに指示することで、 停止したロボットの復旧等の対応ができるようになる遠隔制御システムだ。
今回の試験運用では、株式会社匠が開発しているオゾンガスで空気を除菌する自律搬送ロボット「タクミクリン」に、遠隔制御用の装置をアドオン。 HATSのシステムと接続することで、遠隔のオペレータからの制御を可能にし、停止したタクミクリンの自立走行を復旧させた。
キビテクはHATSの今後の展開について、さまざまな既存の自律搬送ロボットに搭載し、 オフィス環境の巡回のほか、物流・工場等の施設内の搬送や、警備・清掃・点検等のサービスへの適用も視野に入れ、 実運用に向けて開発していくとしている。

