日産とJAXA(宇宙航空研究開発機構)が共同研究中の「月面ローバ」の試作機が公開された。現時点では地球上での試験を前提としているため空気タイヤを履いているなど月面仕様でない部分もあるが、日産が量産EVの開発で培ってきた技術を活かせるということで2020年1月より共同研究に参画している。砂地に覆われた月面を走破する探査機の研究は市販車の電動四駆にも役立つという。一体どういうことなのだろうか。詳しく紹介したい。
月面ローバで得られるのは砂地の走破性に関する知見だ
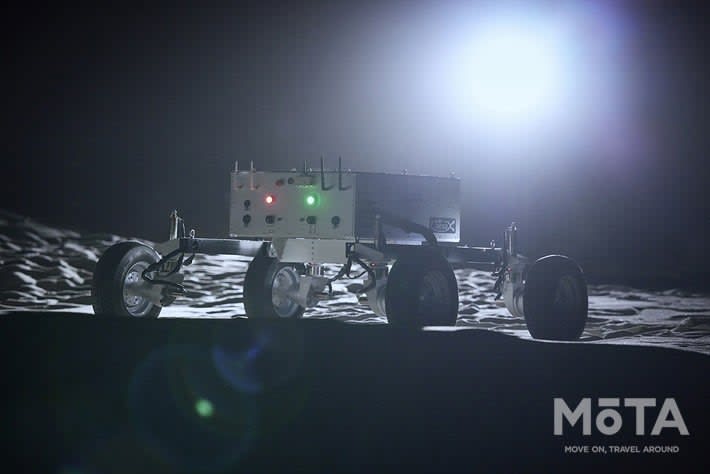
研究成果として発表されたのが、今回公開された月面ローバのプロトタイプだ。
残念ながら車両についての詳細なスペックは公表されていないが、外観およびエンジニア氏に質問した範囲で判明しているのは、省電力仕様の電動車両であり、インホイールモーターの四輪駆動かつそれぞれの車輪が独立した四輪操舵仕様になっている。なるほど、EVのパイオニアともいえる日産が関わっているというのにふさわしいプロフィールの月面ローバとなっている。

しかしポイントは、そうした駆動&操舵システムではない。月面ローバの共同研究におけるメインテーマは砂地での走破性にある。ご存知のように月面というのは「レゴリス」と呼ばれる非常に細かい砂に覆われている。
砂地というのは地球上においてもスタックしやすいシチュエーションだが、もし月面のレゴリスに足を取られてスタックしてしまったら助けにいくことは実質的に不可能。そのためスタックしない走破性が求められる。

月面ローバの研究はe-4ORCEの開発につながっている
そこで日産が新型EVに搭載する「e-4ORCE」が登場する。これは電動駆動ならではの四輪駆動制御技術を示すテクノロジーの名称だが、そこで得られた知見を利用することにより月面で確実に前に進むトラクション能力を得ることを目指している。

また、月面ローバにおいては利用できるエネルギーも限られる。砂をはじきとばして走破するような走り方はNGだ。スリッピーな条件を確実に効率よく走り抜けることが求められる。
この2つを両立することがJAXAと日産による共同研究のテーマだ。
砂地でのトラクションと消費電力の関係が数値化された
具体的には、刻一刻と状況が変わる砂の特性を数値化することが研究テーマとなっている。日産のエンジニア氏によると、現実的に世界中の自動車メーカーで砂の特性を数値化できている会社はないという。そのため経験則によってサンドモードのような砂地に合わせたセッティングは可能であっても、砂地をデジタルで再現することは困難というのが現実だ。
JAXAとの共同研究では、そうした砂の特性を数値化することがテーマだ。砂の上でタイヤがグリップする状態、またスリップする状態、さらにはタイヤが沈み込んでいく状態の原理原則を解明することにより、確実なシミュレーションを行なえるきっかけにしたいということだ。

そうした事象を解明すべく、JAXAが保有する宇宙探査フィールドという屋内に月面を再現した実験場にて共同研究が進められている。
砂地では空転させた方が駆動力を稼ぐことができる
そこで得られた知見の一例をあげると、タイヤの空転とトラクション能力にはユニークな関係があるということが判明した。素人考えでは可能な限りタイヤがスリップしないように制御したほうが前に進むと思いがちだが、ある程度までは空転させたほうが駆動力を稼ぐことができることがわかった。
ただし駆動力を増やしていくと、砂の抵抗も増えてしまう。つまり消費電力も大きくなってしまうというわけで、駆動力自体のマックスが狙えるゾーンと砂の抵抗と駆動力のバランス的にもっとも省電力なゾーンというのが異なることも明らかになった。
このように砂地特有のトラクションと消費電力の関係が数値化されたことは月面ローバの開発における2大テーマを解決することにつながるというわけだ。
砂地という悪条件下の研究は電動車の開発に生きている
では、そうしたノウハウは我々が乗るような日産の四輪駆動車にも応用できるのか。その点について伺うと、考え方自体はエンジン車のも取り入れることは不可能ではないが、制御のきめ細やかさを考えると電動車両でこそ活きてくるという。

言うまでもなくエンジンの反応速度とモーターのレスポンスは比べものにならないほどモーターの方が優れている。しかも日産の電動車では前後に独立したモーターを採用しているため、エンジン車であればエンジンで生み出したトルクをトランスファーやプロペラシャフト、デファレンシャルを介してタイヤに伝えるという部分でのタイムロスも圧倒的に少ない。砂地という悪条件で理想的な制御をするには電動化は絶対条件といえる。
さらにいうと意外に知られていないかもしれないが、日産のEVというのは他社EVと比べても駆動制御が細やかになっている。それは初代リーフからの特徴で、歯車のバックラッシュやドライブシャフトの捩れまでも考慮した駆動コントロールを行なっている。このあたりの違いは、よく気にして比較試乗すると誰でも感じられるほどで、EV開発の歴史が長い日産のアドバンテージだ。

こうした1/1000秒単位での制御があってこそ、砂地という非常に難しい条件における走破性を上げることが可能になる。
市販車の電動4WD「e-4ORCE」へフィードバックしている
今回、月面ローバの試作機の発表と同時に、前後にモーターを搭載した日産の電動4WD「e-4ORCE」試作車による実験ムービーを見ることもできたが、そこでは砂地の走破性を向上させる制御をいれたことで、タイヤが沈みこむことなく確実に前進していく様子が確認できた。
この共同研究を通して得られた知見は、電動パワートレインの砂地走破性を大きく向上させる。

さらに前述したように、走破性重視のモード、省電力重視のモードを使い分けることもできるというのはEVユーザーにおいてもメリットとなる。もし砂漠中で電欠してしまったら命にかかわる。可能な限り省電力で砂地を走り抜けることは地上のユーザーにとっても大きな価値となるだろう。
日産のEVにおいて前後モーターの独立駆動により走行性能を高めるe-4ORCEはコアテクノロジーになっていくことは間違いない。舗装路における前後駆動力配分によるコーナリング性能の向上などに注目しがちだが、砂地という非常に難しいシチュエーションにおける走破性向上は、SUVムーブメントにおけるEVだけの価値を創出するひとつのポイントになりそうだ。
【筆者:山本 晋也】

