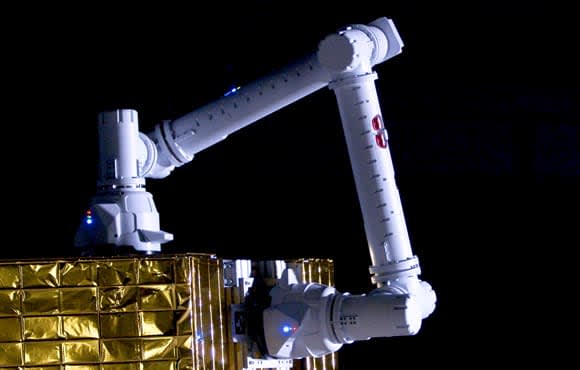
GITAI Japan株式会社は、稼働爪を持つグラップルエンドエフェクタをアームの両端に搭載したシャクトリ虫型ロボットアーム「GITAI IN1」を開発した。
GITAI IN1に搭載しているグラップルエンドエフェクタとグラップルフィクスチャは、ロボットアームの手先を着脱可能にするためのインターフェース。嵌合した際に機械結合、電力結合、通信結合の機能を備え、エンドエフェクタ・ツールなどの操作が可能になるという。1台のロボットアームに対し、様々なエンドエフェクタやツールを切り替えることで、複数の仕事を実施できる「タスク性能」を実現している。
グラップルフィクスチャを人工衛星やローバなどの移動体壁面に設置し嵌合することで、体上を自由に移動。建造物等に設置すれば、アームの移動範囲が上下左右に広がる。広範囲で仕事が可能な「移動性能」を実現。
模擬月面環境での実証実験
「移動性能」検証試験
同ロボットが自律移動して月面着陸機からローバーに乗り移り、作業地点まで移動して所定の作業を行った後、再び月面着陸機に戻る「移動性能」の検証を実施した。
「タスク性能」検証試験
月面資源採取作業を想定し、切削工具を使った資源サンプルの破壊、シャベルを使った回収、牽引車を使った運搬など、一連の作業を複数のツールを使い分け、「タスク性能」の検証を実施した。

