
【▲ ispaceのランダーを搭載したファルコン9ロケットの打ち上げ(Credit: SpaceX)】
2022年12月11日16時38分(日本時間・以下同様)、ispaceの月面探査プログラム「HAKUTO-R」ミッション1の無人月着陸船(ランダー)が米国フロリダ州のケープカナベラル宇宙軍基地から打ち上げられました。HAKUTO-Rミッション1ランダーは、2023年4月に「氷の海」の南東にあるアトラス・クレーターに着陸する予定です。
HAKUTO-Rミッション1ランダーはスペースXの「ファルコン9」ロケットで打ち上げられ、発射から47分後にファルコン9の第2段から分離されました。日本橋にあるispaceの管制室と分離後のランダーとの通信は、欧州宇宙機関(ESA)のネットワークを介して行われています。
【▲ HAKUTO-Rミッション1ランダーが撮影した遠ざかる地球(右下に写っているのはispaceのパートナー企業名を記したプレート。Credit: ispace)】
ispaceによると、12月12日の時点では安定した電力供給の確立とランダーの基幹システムに不備のないことが確認され、初期クリティカル運用(初期動作確認)状態の完了が確認されました。
HAKUTO-Rミッション1では打ち上げから月面着陸までの各段階に応じて10のマイルストーンが設定されています。12月12日時点ではSuccess 1「打ち上げ準備の完了」とSuccess 2「打ち上げおよび分離の完了」が完了しており、ランダーに搭載されている顧客ペイロードの状態確認が終わり次第、Success 3「安定した航行状態の確立」が完了する見込みです。
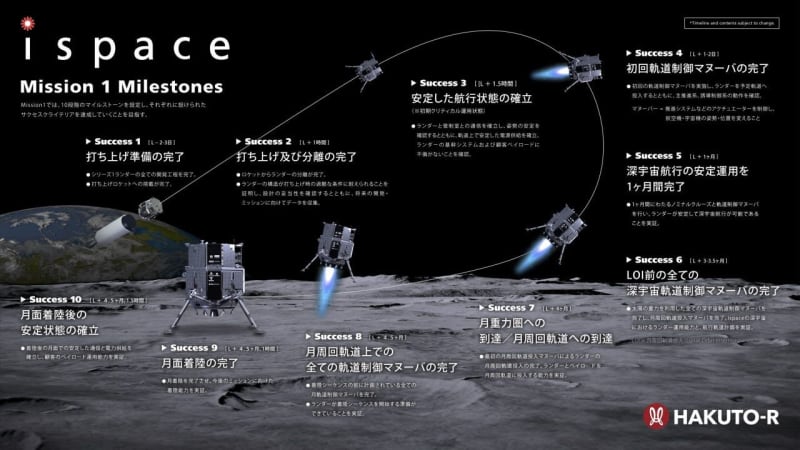
【▲ ispace「HAKUTO-R」ミッション1のマイルストーンを示した図(Credit: ispace)】
なお、HAKUTO-Rミッション1ランダーには以下7つのペイロードが搭載されています。
・日本特殊陶業株式会社(HAKUTO-Rコーポレートパートナー)の固体電池
・アラブ首長国連邦(UAE)ムハンマド・ビン・ラシード宇宙センター(MBRSC)の月面探査車「Rashid(ラシード)」
・株式会社タカラトミー等が開発した変形型の月面探査ロボット「SORA-Q(LEV-2)」
・カナダのMCSS社が開発した人工知能(AI)を用いたフライトコンピューター
・カナダのCanadensys社のカメラ
・HAKUTOのクラウドファンディング支援者の名前を刻印したパネル
・サカナクションの「SORATO」(HAKUTO※応援歌)の楽曲音源を収録したミュージックディスク
※…HAKUTOは民間初の月面無人探査を競うコンテスト「Google Lunar XPRIZE」に日本から参加したチームで、HAKUTO-Rの前身にあたる。Google Lunar XPRIZEは勝者がないまま2018年に終了。

【▲ UAEの月面探査車「Rashid」の想像図(Credit: MBRSC)】

【▲ 変形型月面ロボット「SORA-Q(LEV-2)」。左は変形前、右は変形後の様子(Credit: タカラトミー)】
Source
文/sorae編集部

