NASAが今後数年で計画しているように宇宙飛行士が月面に恒久的な基地を建設する際には、彼らは助けが必要になる。ケーブルの敷設、ソーラーパネルの設置、通信塔の建設、居住区の建設など、力仕事をロボットが行う可能性がある。
しかし、それぞれのロボットが特定の動作やタスクのために設計されている場合、月面基地は、それぞれ独自の部品やプロトコルを持つ機械の群れで溢れかえることになりかねない。
そこで、MITのエンジニアチームは、宇宙飛行士が簡単に組み合わせて、月でのさまざまなミッションに適したさまざまなロボット「種」を迅速に構成できるような、汎用的なロボットパーツのキットを設計しているという。ミッションが完了したら、ロボットを分解し、その部品を使用して、異なるタスクに対応する新しいロボットを構成することができるとしている。
研究チームは、このシステムを「Walking Oligomeric Robotic Mobility System(歩行型オリゴメリック・ロボティック・モビリティ・システム)」の略称でWORMSと呼んでいる。このシステムの部品には、宇宙飛行士が簡単にベースにはめ込むことができる、ミミズをモチーフにしたロボットの手足が含まれており、それらが連携して歩行ロボットとして機能するようになっている。
ミッションに応じて、パーツを組み合わせて、例えば、重いソーラーパネルを坂道で運ぶことができる大型の「パック」ロボットを作ることができる。また、同じパーツを組み替えて、溶岩洞窟に下ろして凍った水を掘削する6本足のスパイダーボットを作ることも可能だという。
MITの航空宇宙学科(AeroAstro)の博士候補生で大学院講師であるチームリーダー、 George Lordos氏は、モーター、センサー、コンピュータ、バッテリーを搭載した独立型多関節ロボットに関して、次のようにコメントしている。
Lordos氏:月面の小屋には、ミミズの棚があると想像できます。宇宙飛行士は小屋に入り、必要なワームを選び、適切な靴、ボディ、センサー、ツールとともに、すべてをスナップでつなぎ、分解して新しいものを作ることができる。この設計は、柔軟かつ持続可能で費用対効果に優れています。
Lordos氏のチームは、6本足のWORMSロボットを製作し、実証しています。先週、彼らはIEEEの航空宇宙会議でその成果を発表し、同会議の最優秀論文賞も受賞している。
WORMSは、2022年にNASAのBreakthrough, Innovative and Game-changing (BIG) Idea Challenge(大学生がゲームを変えるようなアイデアを設計、開発、実証するための年次コンテスト)への回答として考案された。2022年、NASAは学生に、車輪を使わずに極端な地形を移動できるロボットシステムの開発に挑戦させた。
MITの宇宙資源ワークショップのチームはこの課題に挑戦し、特に月の南極の極端な地形(厚くふわふわした塵、急な岩の斜面、深い溶岩洞など)を移動できる月ロボット設計を目指している。また、「永久影」と呼ばれる地域には、凍った水が存在する可能性があり、そこにアクセスできれば、宇宙飛行士の生活維持に不可欠なものとなる。
月面の極地を移動する方法を考えるにあたり、学生たちは動物からヒントを得た。最初のブレインストーミングで、ある動物があるミッションに適しているというコンセプトが浮かんだという。それは、クモなら溶岩洞窟を探検できる、ゾウの列なら急斜面を支え合いながら重機を運べる、ヤギなら牛につながれてソーラーパネルを運ぶ大きな動物を丘の中腹まで誘導できる、などといったことだった。
副チームリーダーで航空宇宙学科の大学院生であるMichael Brown氏は次のようにコメントしている。
Brown氏:このような動物のアイデアを考えているちに、最も単純な動物の1つであるミミズが、腕や脚、背骨、尾と同じような動きをすることに気づきました。そして閃きました。「ミミズのような付属器官を使って、動物にインスパイアされたロボットを作ることができるんだ」ってね。
ギリシャ系のLordos氏はWORMSの造語に協力し、ギリシャ語で「いくつかの部品」を意味する「Oligomeric」の頭文字をとって「O」を選んだという。
航空宇宙学科の学部生であるBrooke Bensche氏は、次のようにコメントしている。
Bensche氏:私たちのアイデアは、いくつかの部品をさまざまな方法で組み合わせることで、さまざまなロボットを作ることができるというものでした。
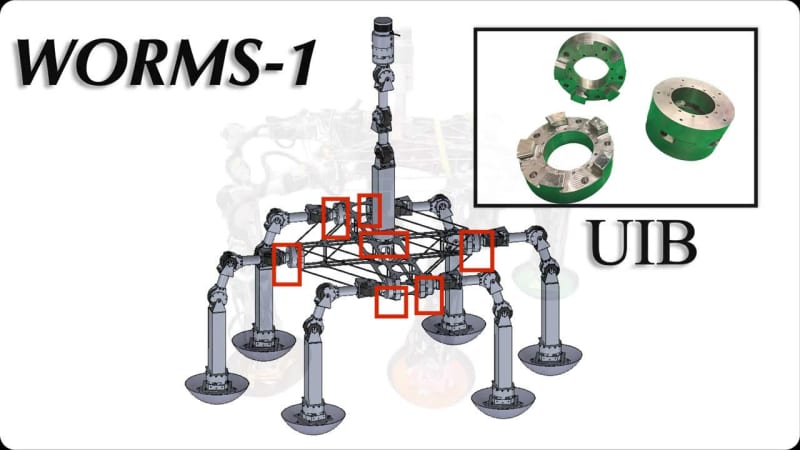
このシステムの主な部品は、「ユニバーサル・インターフェース・ブロック」を介して、ボディ(シャーシ)に取り付けることができる付属器官(ワーム)だ。また、ブロックのバネ式ピンを外すと、小型の工具で取り外しが可能である。
さらに、中華鍋の形をした「シュー」や、周囲をマッピングしてロボットのナビゲーションを支援する「LiDARシステム」などのアクセサリーにも、付属品やボディをはめ込むことができる。
また、航空宇宙学科の学部生であるJacob Rodriguez氏は、次のように述べている。
Rodriguez氏:将来的には、ウィンチ、バランスセンサー、ドリルなど、スナップオン式のセンサーやツールを追加したいと考えています。
チームは、複数の付属物を調整できるソフトウェアを開発。チームはコンセプトの実証として、ゴーカートほどの大きさの6本足ロボットを製作した。実験室では、ロボットが組み立てられると、ロボットの独立した手足が平地を歩くように機能することが示された。また、カリフォルニアの砂漠地帯のフィールドで、ロボットの組み立てと分解を素早く行えることも確認したという。
第一世代では、WORMSの各手足は長さ約1メートル、重さ約20ポンド。地球の約6分の1である月の重力下では、各肢の重さは約3ポンドとなり、宇宙飛行士が現場でロボットを組み立てたり分解したりするのに簡単に扱うことができる。研究チームは、より長く、より重い付属品を持つ、より大きな世代のスペックを計画しているという。このような大きな部品を組み合わせて、重い荷物を運ぶことができる「パック」ロボットを作ることが可能だ。
2022年のBIGアイデアチャレンジの審査員を務めたNASAラングレー研究所のエンジニア、Kevin Kempton氏は次のようにコメントしている。
Kempton氏:将来の宇宙探査に有効なシステムを表す言葉には、モジュラー、再構成可能、適応性、柔軟性、横断的、などなど、たくさんの流行語があります。
この研究は、NASA、MIT、マサチューセッツ宇宙助成金、全米科学財団、ファニー&ジョン・ハーツ財団から一部支援を受けて行われている。

