実験内容について
目的
ドローンを活用し、イノシシ罠の見回り作業の効率化を図り、持続可能な鳥獣被害対策モデルを構築する。
実験内容
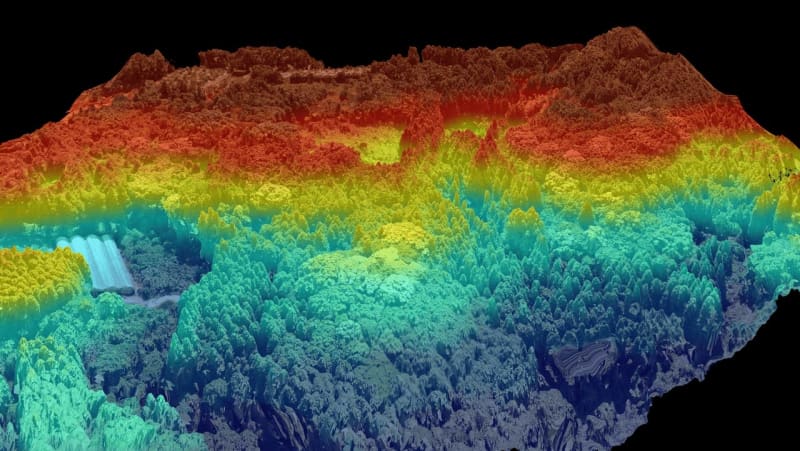
自動飛行によるドローンによるイノシシ罠の見回りを実施します。山全体の3Dデータを事前に取得、飛行空域のリスクアセスメントを実施し、最適なドローン空路データを設定。次に、罠の地点の緯度経度情報をドローンに登録し、動画・サーモカメラによる自動撮影を実施。これにより、険しい山奥に点在する多数の罠(イノシシが罠にかかっているかどうか)を効率的に確認する。

期待効果
見回り作業の効率化により、猟友会メンバーの負担を軽減し、イノシシ捕獲のタイミングを最適化します。これにより、農作物被害の抑制と農家の経済的負担の軽減が期待できる。

実験期間
2023年度~2024年度
実験場所

多久市内の森林
実施主体

・トルビズオン
・佐賀県猟友会多久支部
使用ドローン機体
DJI Matrice300 RTK
今後について
佐賀県猟友会多久支部は、高齢化や人手不足が進行する中で、イノシシ被害への対策としてドローンを活用した新たな取り組みを検討している。本プロジェクトの目的は、イノシシ罠の見回りを自動化し、持続可能な鳥獣被害対策モデルの構築を目指すことである。
さらに、本実験を通じて構築したドローン空路は、罠の巡回や森林調査で使用しない時間帯については、将来的に山間部の災害調査や操縦訓練、過疎地へのドローン配送、空飛ぶクルマなどの空路を想定している。

