
製油所内の防油堤などの段差や狭所、草地、砂利、水たまりや夜間を含めた多様な環境での走行試験を通じて高い走破性を確認するとともに、製油所での点検作業を代替した計器画像、熱画像、音声情報の取得に成功したという。

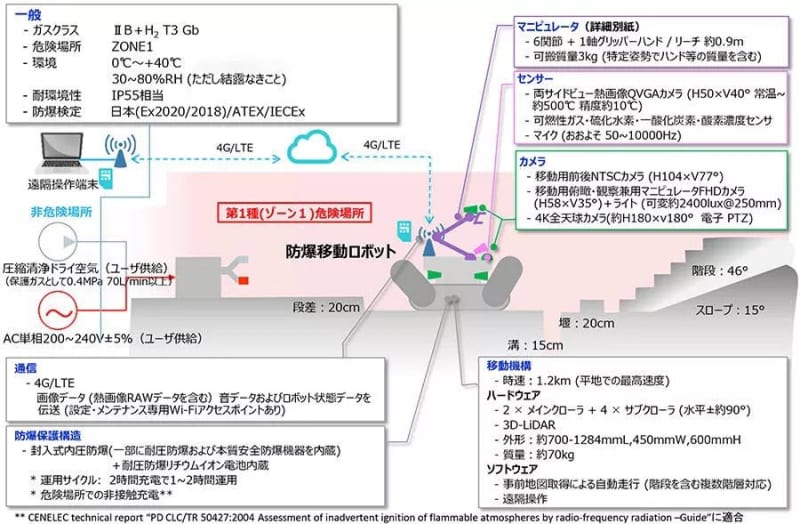
EX ROVRは、爆発性雰囲気となり得る状況下において昼夜を問わず点検作業を行い、作業員の安全性向上、業務効率化および設備稼働率の向上に貢献する。照明付きカメラを搭載した6自由度防爆マニピュレーターの採用により、プラント内計器の複雑な配置に応じたさまざまな姿勢で近接・正対画像を撮影できるほか、ガス濃度の測定や音声の録音、熱画像の取得も可能だ。

さらに付属のウェブアプリと組み合わせて活用することで、遠く離れた場所からでも点検スケジュールの運用管理や点検データの確認を行えるほか、プラントにおけるインシデント発生時には遠隔操作によりタイムリーな現場確認が可能で、プラント点検業務の効率化と安全かつ迅速な事態収束に貢献するという。

また、EX ROVRはユーザーインターフェースを考慮した設計で操作も容易であることから、ENEOS大分製油所の運転員が短期間で操作方法を習得し、稼働中の実プラントでの遠隔操作、走行ルートや点検動作の設定、自動走行を実施できる。
また、三菱重工は米国ヒューストンにて10月に開催された国際会議「SPRINT Robotics World Conference」にEX ROVRを出展した。同会議では、ENEOSとともに長期試用の成果や2030年までの運用ロードマップなどについて紹介、各国の事業者から問い合わせを得るなど、国内外からの高い評価を得たという。

EX ROVR "ASCENT"
防爆性能及びハードウェア仕様
- Zone1の危険場所に対応可能な防爆性能を有し、危険場所での非接触充電により高い稼働率を実現
- 高い走破性を有し、マルチフロア(46°の階段を自律で昇降)の自動巡回が可能
- ハンドアイカメラを搭載した6自由度マニピュレータを有し、計器類の画像を近接・正対して取得
- ガス検知器、マイクを搭載し、ガス濃度、音等のプラント情報の取得可能
防爆機能
様々な国の規制に対応 日本(Ex2018)、IECEx、ATEX
- ガスクラス:IIB+H2 T3 Gb
- 危険場所:Zone 1
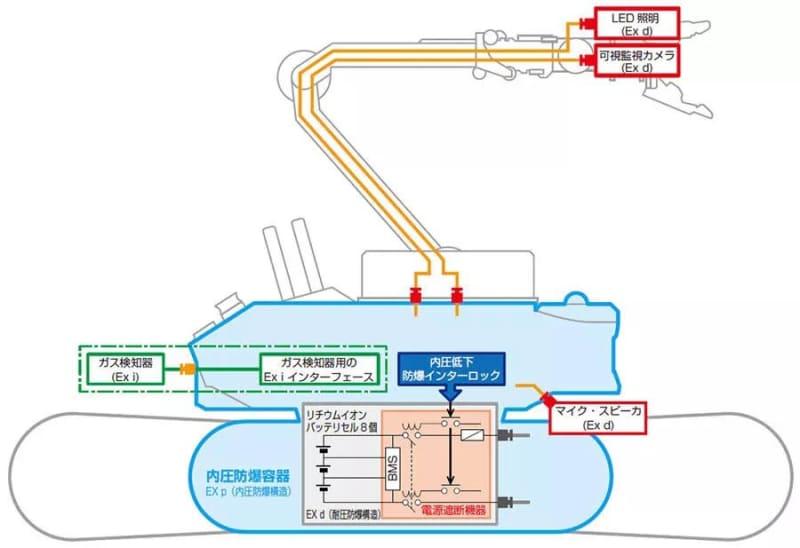
ASCENTは、移動用のメインクローラ/サブクローラおよびマニピュレータ用モータを含む本体を1つの内圧防爆構造容器としている。
各部を駆動する内蔵バッテリは、リチウムイオン電池の制御部と電池部を共に耐圧防爆構造のケースに収納している。ASCENTに装備されるLED照明、ガス検知器、可視監視カメラ、マイク&スピーカは独立した防爆仕様を備えている。
自動運転
複雑なプラント内を夜間でも安全に自動巡回
- LiDARによる3次元自己位置推定
- 障害物検知
- 階段昇降アルゴリズム
高い機動性
狭隘かつ複数フロアにまたがる複雑なプラント内を稼働
- 46°(基準最大)の階段昇降
- 狭い階段踊り場での旋回
- 防油堤の障害物乗り越え
ASCENTの走行性能
マニピュレータ
様々な姿勢で計器に近接・正対して画像取得、ハンドでの簡易作業

- 6自由度防爆マニピュレータ
- 対象物の形状に倣うハンド
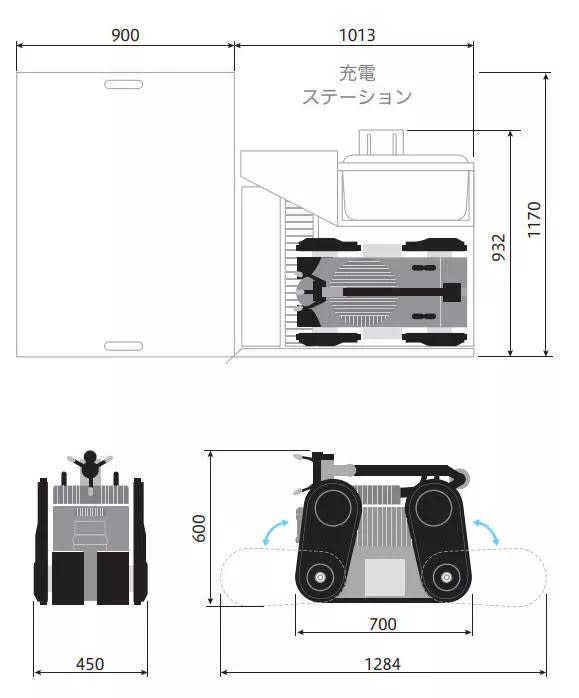
自動充電
危険場所で長時間にわたり連続稼働
- 危険場所での大容量非接触自動給電
- 2時間満充電で最大2時間稼働の高い稼働率
主な外形寸法(mm)
本体質量:70 kg
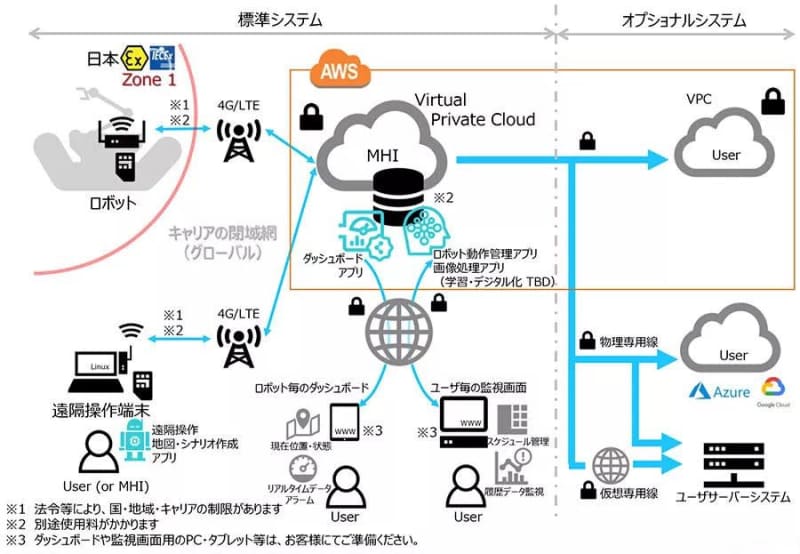
データ蓄積
様々な場所から点検計画を設定、点検データを確認
- お手持ちのウェブブラウザで点検メニューとスケジュールの設定
- クラウド上で点検データ蓄積・分析
- 4G/LTEを介し、ロボットの管理、遠隔操作を実施
- ロボットが取得したプラント情報はクラウドに保存し、履歴を管理
三菱重工は今後も、ロボットの長期試用を通じて点検データを蓄積するとともに、蓄積した点検データから異常兆候を早期に把握可能とする判定アプリ開発を進め、さらなる製品価値の向上に努めていいくとしている。

