これらのタスクは軌道上の衛星整備に不可欠であり、国際宇宙ステーション(ISS)外で長さ1.5mの自律型デュアルロボットアームシステム(S2)を使用して達成された。このマイルストーンにより、GITAIは2021年のISS内での実証に続き、2回目の実証に成功した。
実証実験について
GITAIの目標は静止軌道(GEO)と低軌道(LEO)の両方で軌道上の衛星サービスを提供することだ。GITAIは、顧客衛星のランデブー、ドッキング、点検、軌道離脱、寿命延長サービスなどのタスクを実行できるロボット衛星を積極的に自社開発している。
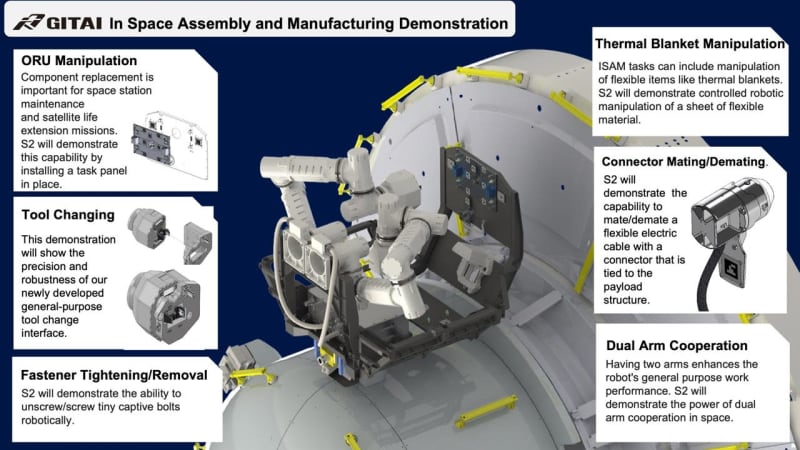
今回のISSでの外部デモンストレーションでは、長さ1.5mのGITAI自律型デュアルロボットアームシステム(S2)が、ISSビショップエアロック外で予定されていた全ての宇宙サービス・組立・製造(ISAM)タスクを成功させた。
本デモンストレーションのタスクはすべて完了したが、6ヶ月の実証期間のうち残り5ヶ月間は信頼性評価試験が継続されるという。
以下は、本実証期間中にGITAIロボットが実施したタスクの一覧:
今回のISS外での実証の成功により、GITAIが開発し、主要部品を全て内製化した全長1.5mの自律型デュアルロボットアームシステム(S2)は、NASAの技術成熟度レベル(TRL)7を達成し、宇宙空間での完全な運用が可能となったという。
また、この実証実験の成功により、S2システムと多くの主要部品を共有するGITAIのインチワーム型ロボットアームもNASAのTRL7に相当することを示した。この外部実証の成功を梃子に、軌道上サービス用ロボット衛星の自社開発を加速し、2026年の軌道上サービス開始を目指すとしている。

