国立大学法人東京大学、国立研究開発法人産業技術総合研究所、イームズロボティクス株式会社、株式会社NTTドコモは、NEDO(国立研究開発法人新エネルギー・産業技術総合開発機構)事業にて、社会実装に求められるドローンの安全性・信頼性保証に関し、機体だけではなく、そのオペレーション(特に複数機飛行時)を含むリスク分析手法とその評価項目選定構築に向けた方向性を確認した。
従来、機体の安全性・信頼性保証は機体メーカーがExcelやドキュメントによるマニュアル作業で実施していましたが、オペレーションを考慮する場合、マニュアル作業では様々なシーンに合わせた十分な安全性・信頼性評価が難しく、実現できていなかった。同研究成果のモデルベースリスク分析により、オペレーションを考慮したリスク分析の実現とその作業効率、分析品質の向上が期待できることを確認したという。
概要
国立大学法人東京大学、国立研究開発法人産業技術総合研究所、イームズロボティクス株式会社、株式会社NTTドコモは、NEDOが実施する「人工知能活用による革新的リモート技術開発/状態推定AIシステムの基盤技術開発及び高度なXRにより状態を提示するシステムの基盤技術開発/AI・XR活用による空のアバターを実現する『革新的ドローンリモート技術』の研究開発」を受託している。
このプロジェクトでは、近未来のスマートシティにおける迅速かつ効率的な救助・警備・点検の実現を目的に5Gで通信接続された複数遠隔ドローンのネットワークとクラウド上のデジタルツインを構築し、状態推定AIによる要救助者、異常行動者等の認識、高度なXR提示技術による災害時の人員不足を解決するワンマンオペレーションの実現を目指している。このようなオペレーションを想定した場合、ワンマンオペレーションで複数のドローンを遠隔操作する安全性をどのような観点で評価し実現すべきかが課題だという。災害などの特殊環境におけるオペレーションの想定リスクを想定し、安心して社会実装するための標準策定に向け、リスク分析と管理の技術開発を実施した。
今回の成果
同事業では、社会実装に向けた構想設計と機体開発の両面から評価を実施。想定されるユースケースに対しARP4761/4754
に準じたリスクアセスメント技術を活用し、複数台のドローンを遠隔コントロールする場合のリスクを分析した。
※ ARP4761/4754:SAE(自動車技術者協会:Society of Automotive Engineers)が発行するARP4761 Guidelines and Methods for Conducting the Safety Assessment Process on Civil Airborne Systems and Equipment及び ARP4754 Guidelines for Development of Civil Aircraft and Systemsのこと。米国連邦航空局(FAA)が推奨する民間航空機などの機体認証に求められる要求をまとめたガイドライン。
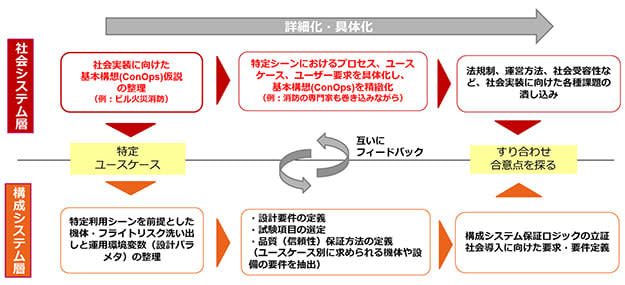
構想設計から社会が危惧する特定ユースケースリスク項目の洗い出し
システムズエンジニアリングを社会実装の構想設計に応用し、当該ユースケースにおけるステークホルダーやコンテキスト、リスク(安全・安心を阻害する要因)を整理した。
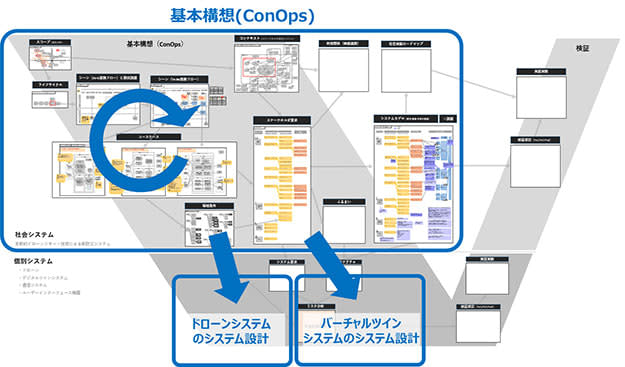
基本構想(ConOps)検討を具体的なユースケースまでブレークダウンし、各ステークホルダーに対しオペレーションリスクと想定される項目を多面的に分解分析し整理したという。この結果、安全・安心に社会実装を進めるために必要なドローン機体に求めるべき安全性要求の項目を洗い出したとしている。
特定ユースケースにおける機体とオペレーション条件下のリスク分析
ARP4761/4754に基づきモデルベースリスクアセスメントを実施した。
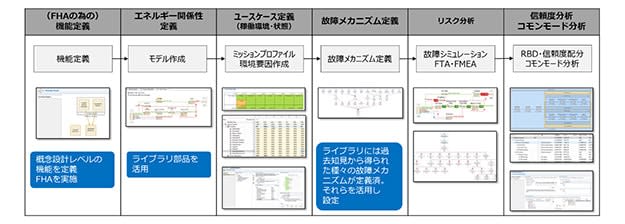
特筆すべきは、基本は単機のリスク評価がベースになっていることだとしている。単機の機能洗い出し、機能間のつながりをモデル化し、リスク分析と信頼性評価を実施する。単機の信頼性とリスクマネジメント方法を確認後、次に同モデルを複数機に複写しオペレーション時の推定状態を1つのシステムと捉えることで複数機飛行時の同様にリスク分析及び信頼性評価を実現したという。
予め単機のモデルを作成するため、複数機のオペレーションや運用条件を追加・変更しても容易に評価を実行可能だという。またオペレーション条件の変更に伴う要求すべき信頼度やリスク対策を、容易に多面的比較評価できるため、メーカは要求に対しリスクとコストを考慮しながら最適な信頼度で機体を設計することができるとしている。
ベースとなる単機のモデルに変更が発生した場合や追加でオペレーション条件が増えた場合などでもモデルベース分析により瞬時に再評価可能だという。同事業で上記試行を実施し、モデルベース信頼性分析の有用性を確認した。
今後の予定
同活動成果は、2022年6月21~23日に幕張メッセで開催される「Japan Drone 2022」の東京大学ブースにおいてパネル展示を予定している。
ドローンの社会実装に向けて、社会実装要求、機体設計、オペレーション条件の3方向から最適な安全性要求項目を設定し、モデルベースでの評価を先行することで、必要最小限の実機性能試験で飛行安全性を確実に保証する評価技術を確立が期待される。実現すれば安全性と機体性能(コスト)の両立により新たなモビリティ社会の実現加速が期待されるという。